
Introdução
No último artigo desta série serão apresentados alguns aspectos sobre filtros digitais, sua implementação e os testes reais de funcionamento, assim como feito para os controladores PID.
Filtros
Filtros são estruturas que realizam o tratamento de sinais, seja por meio da diminuição de ruídos, restauração de distorções ou seleção de frequências. Os filtros digitais se tornaram superiores aos filtros analógicos em termos de desempenho, se tornando uma das razões da popularidade do processamento digital de sinais.
Resposta em Frequência
Quando um filtro é projetado, as seguintes características e especificações são de importante atenção:

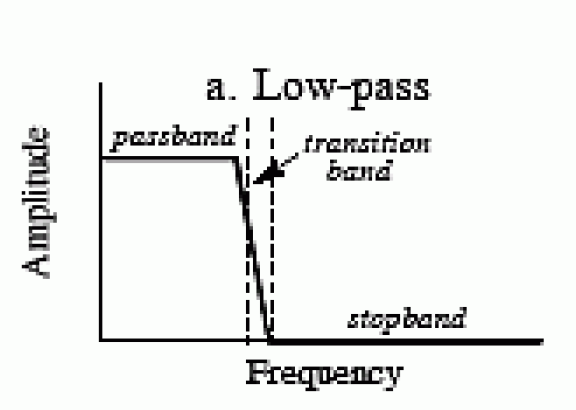
Esta figura representa a resposta em frequência de um filtro passa-baixas. No eixo-y, está o ganho do sistema dinâmico e, no eixo-x, as frequências.

Os Melhores Treinamentos sobre Sistemas embarcados e IoT
Cursos com professores qualificados para acelerar sua carreira e projetos
Faixa (ou banda) de passagem são aquelas frequências do sinal que não sofrem alterações significativas ao serem processadas. Para estas frequências o ganho do sistema é de 1, ou , com tolerâncias .
Faixa de transição são aquelas frequências que estão entre os limites da banda de passagem e da banda de rejeição (). Frequência de corte é aquela em que o ganho é de . A partir desta, em filtros passa-baixa, as frequências são atenuadas. Em filtros passa-altas, são mantidas.
A faixa de rejeição compreende as frequências que serão atenuadas.
Transformada de Fourier
A transformada de Fourier é um método matemático capaz de separar as diferentes componentes senoidais que constituem um sinal e analisá-las em termos de magnitude e fase.
As figuras a seguir ilustram um sinal formado por uma senoide de frequência igual a 20hz e amplitude unitária somada a outra de 40hz e amplitude dois e o seu respectivo gráfico de magnitude da Transformada de Fourier.
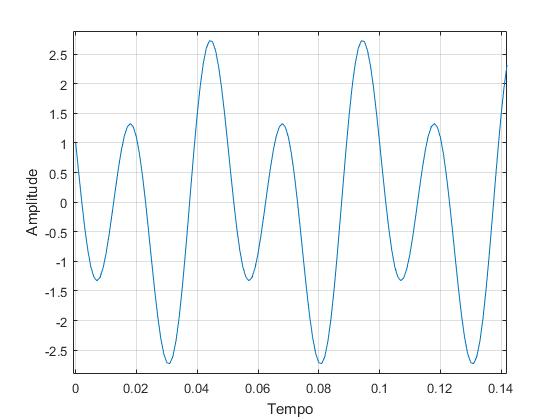
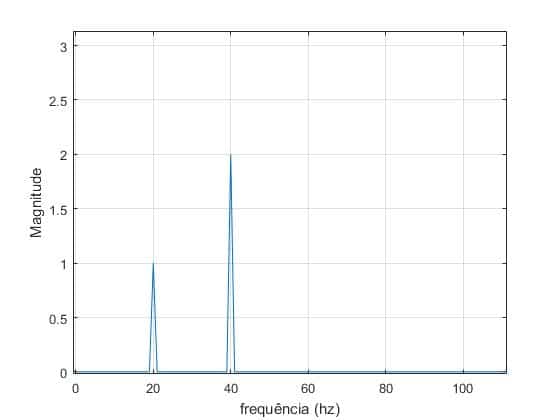
Através da transformada de Fourier é possível identificar a amplitude das duas componentes de frequência. Sendo assim, o sinal é formado por uma componente senoidal de frequência 20hz e amplitude unitária e outra de 40hz e amplitude igual a dois.
A seguir serão apresentados os detalhes de projeto de alguns filtros de primeira ordem já no domínio digital. Estes filtros possuem, entretanto, sua versão analógica, cujas topologias são bastante conhecidas, fazendo uso de resistores, capacitores e indutores.
Filtro Passa-Baixas
Os filtros passa-baixas são aqueles os quais possuem ganho próximo a um para frequências abaixo da frequência de corte e atenuam aquelas frequências maiores. A resposta em frequência destes sistemas é similar à apresentada a seguir:
Um filtro passa-baixas de primeira ordem tem a seguinte função de transferência discreta:
Onde:
Filtro Passa-Altas
Os filtros passa-altas são aqueles os quais possuem ganho próximo a um para frequências acima da frequência de corte e atenuam aquelas frequências menores. A resposta em frequência destes sistemas é similar à apresentada a seguir:

Um filtro passa-altas de primeira ordem tem a seguinte função de transferência discreta:
Filtro Passa-Faixa
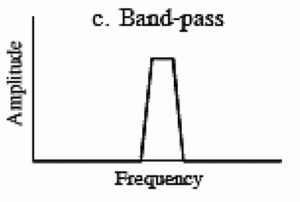
Os filtros passa-faixa são aqueles os quais possuem ganho unitário para um grupo em torno de uma frequência central e atenuam as demais. A resposta em frequência destes sistemas é similar à apresentada a seguir:
Um filtro passa-faixa de primeira ordem tem a seguinte função de transferência discreta:
Este tipo de filtro pode, também, ser obtido pela associação em cascata (multiplicação) de um passa-baixas e um passa-altas.
Filtro Rejeita-Faixa
Os filtros passa-faixa são aqueles que atenuam um grupo em torno de uma frequência central e possui ganho próximo a um para as demais. A resposta em frequência destes sistemas é similar à apresentada a seguir:

Um filtro rejeita-faixa de primeira ordem tem a seguinte função de transferência discreta:
Este tipo de filtro pode, também, ser obtido pela soma de um passa-baixas e um passa-altas.
Filtro de Média Móvel
Os filtros de média móvel são utilizados para redução de ruído aleatório de sinais. Não possui equivalente analógico. É normalmente implementado utilizando a convolução, porém a implementação recursiva também é possível.
Seu funcionamento consiste em fazer com que a amostra atual do sinal filtrado seja igual à média do sinal de entrada atual e seus anteriores. Quanto maior a ordem do filtro, maior a quantidade de amostras envolvidas no cálculo da média, maior também a redução do ruído, porém como consequência, ocorre uma deformação da forma de onda.
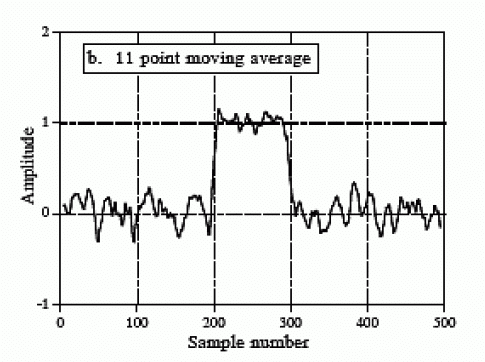
A redução do ruído é dada por , onde N é a ordem do filtro. As figuras a seguir ilustram a redução de ruído de um sinal utilizando dois filtros de ordem diferente.


Um filtro de média móvel tem a seguinte equação temporal:
E a seguinte função de transferência:
Testes
Para realização dos testes, o código será o mesmo apresentado no artigo anterior. Neste artigo é implementado um sistema dinâmico digital de segunda ordem utilizando ponto fixo. Sendo assim, apenas os coeficientes da equação de diferenças serão alterados para os coeficientes dos respectivos filtros.
Foi configurado em um gerador de funções uma forma de onda com cinco componentes de frequência. Senoides com 200, 400, 600, 800 e 1000hz, além de um nível DC, já que os valores de tensão suportados pelos conversores analógico-digital e digital-analógico estão dentro do limite de 0 a 3,3V.
A figura a seguir representa este sinal e sua Transformada de Fourier:
Filtro Passa-Baixas
Foi projetado um filtro passa-baixas de primeira ordem com frequência de corte em 300hz e frequência de amostragem igual a 10khz.
A função de transferência do filtro é:
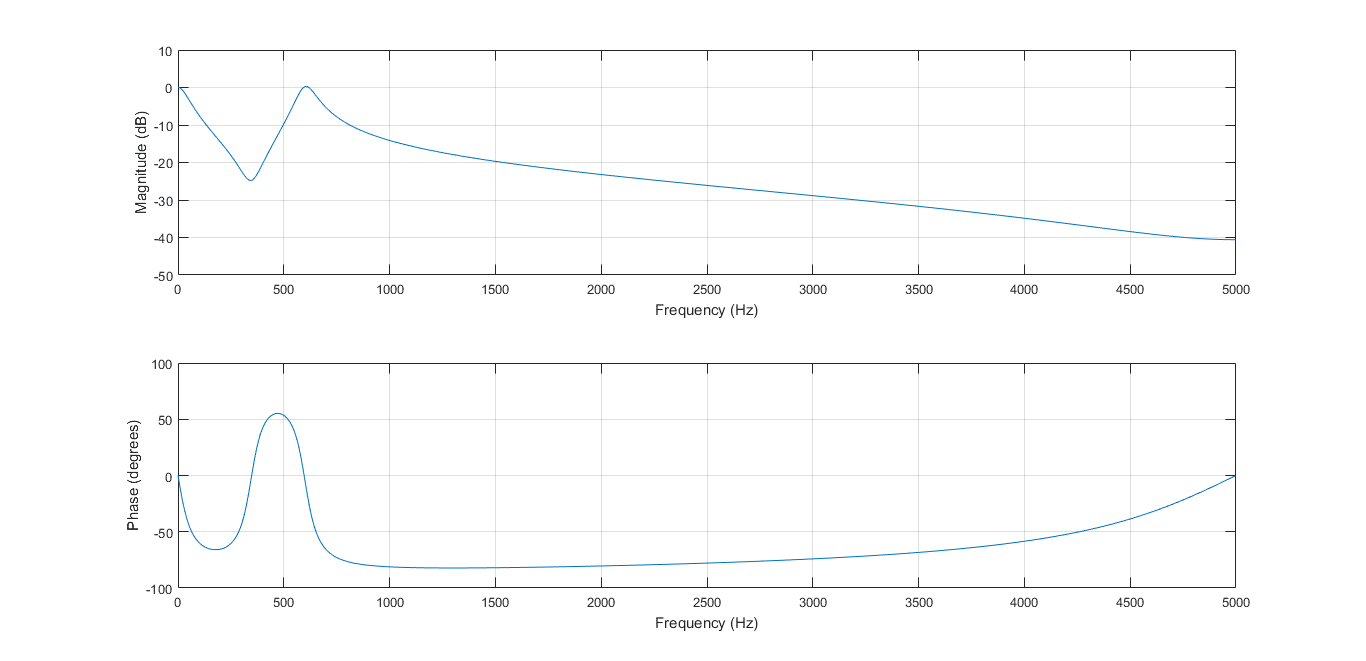
A resposta em frequência deste filtro é apresentada a seguir:

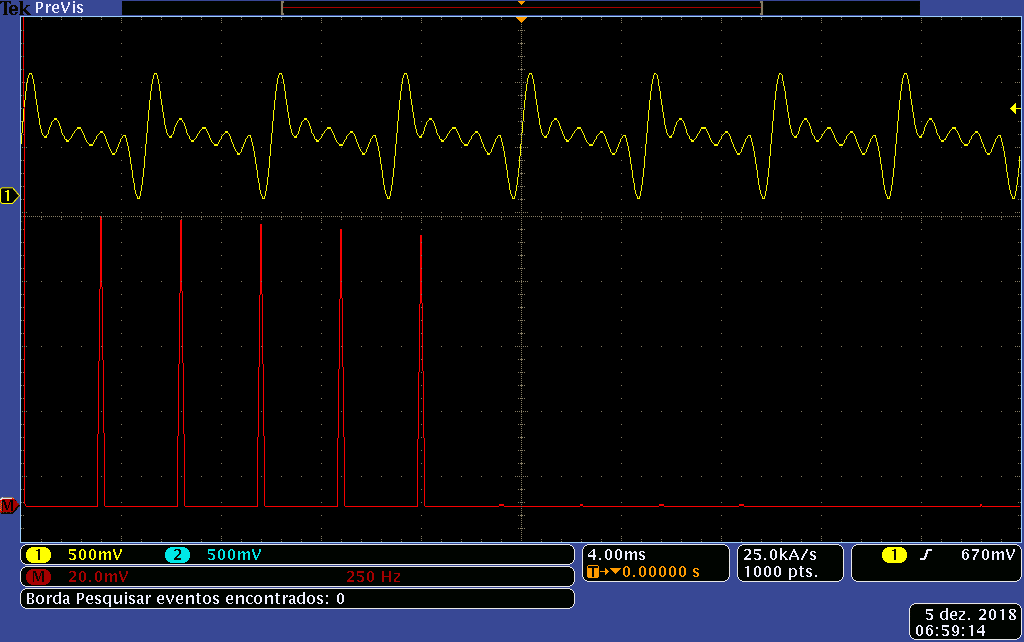
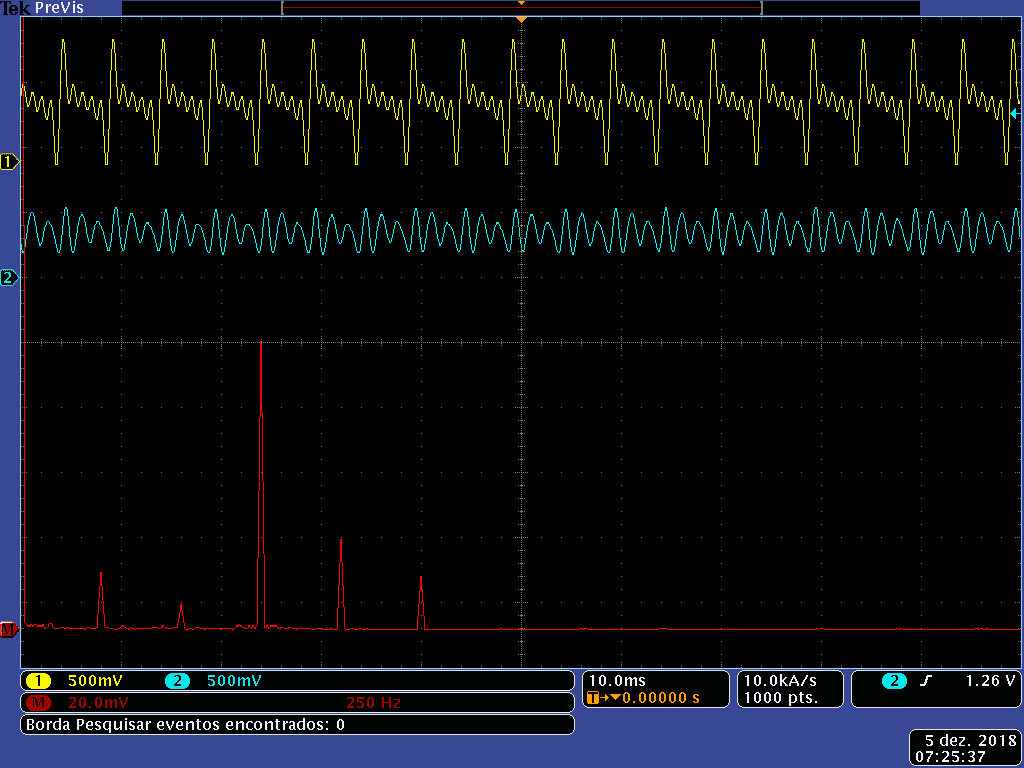
A figura a seguir mostra as formas de onda do sinal de entrada, do sinal filtrado:

Em amarelo está representado o sinal de entrada, em azul o sinal de saída filtrado e em vermelho a Transformada de Fourier do sinal de saída.
Como a frequência de corte deste filtro está em 300hz, as componentes de frequência igual a 400, 600, 800 e 1000hz tiveram suas amplitudes atenuadas significativamente como pôde ser observado. A componente de 200hz também sofreu atenuação, mas não tão significante.
Filtro Passa-Altas
Foi projetado um filtro passa-altas de primeira ordem com frequência de corte em 500hz e frequência de amostragem igual a 10khz.
É necessário que o nível DC seja mantido, já que os valores de saída do DAC se limitam a valores positivos. Sendo assim, foi então a este filtro um filtro passa-baixas com frequência de corte em 50hz, resultando na seguinte função de transferência:
A resposta em frequência deste filtro é apresentada a seguir:

A figura a seguir mostra as formas de onda do sinal de entrada, do sinal filtrado:
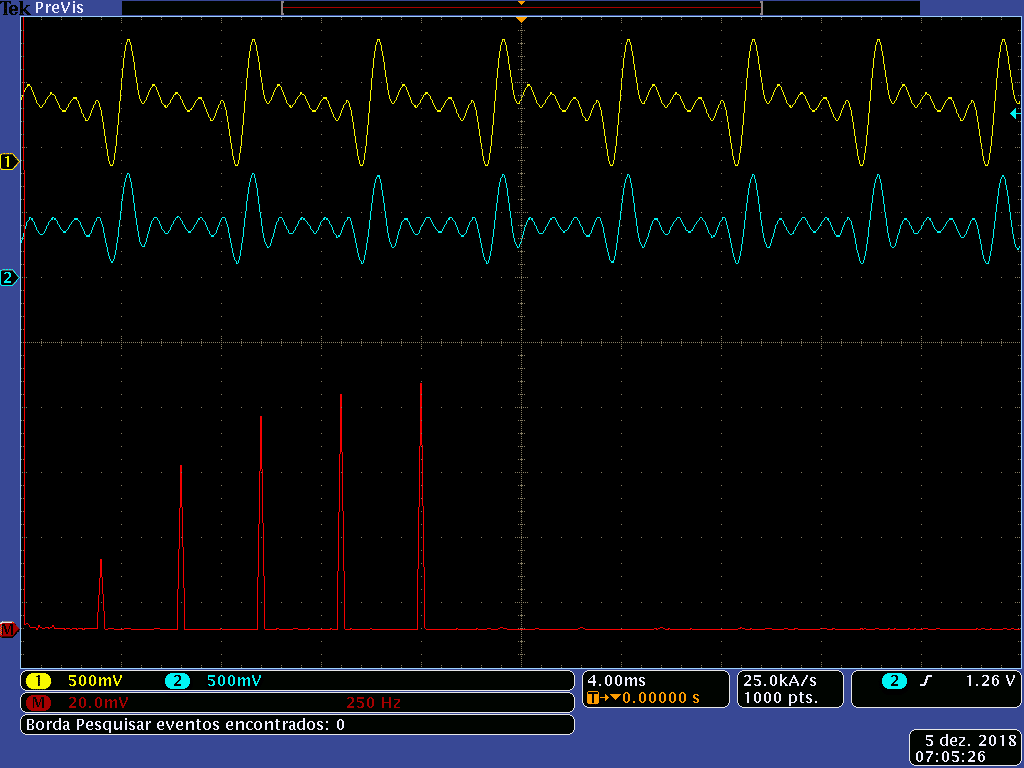
Como a frequência de corte deste filtro está em 500hz, as componentes de frequência igual a 200 e 400hz tiveram suas amplitudes atenuadas significativamente como pôde ser observado. As componentes de 600, 800 e 1000hz também sofreram atenuação, mas não tão significante. Pode ser observado também que o nível DC manteve-se, como esperado ao somar à função de transferência do filtro passa-altas, um filtro passa-baixas.
Filtro Passa-Faixa
Foi projetado um filtro passa-faixa de primeira ordem com frequência central igual a 600hz, 100hz de largura de banda e frequência de amostragem igual a 10khz.
Novamente, é necessário que o nível DC seja mantido. Foi somado, então a este filtro um filtro passa-baixas com frequência de corte em 50hz, resultando na seguinte função de transferência:
A resposta em frequência deste filtro é apresentada a seguir:
A figura a seguir mostra as formas de onda do sinal de entrada, do sinal filtrado:
Como banda de passagem deste filtro está entre 500 e 700hz, a componente de frequência igual a 600hz não teve sua amplitude atenuada. As componentes de 200, 400, 800 e 1000hz não foram atenuadas por completo, porém tiveram uma redução significante. O nível DC manteve-se.
Filtro Rejeita-Faixa
Foi projetado um filtro rejeita-faixa de primeira ordem com frequência central de 600hz, 100hz de largura de banda e frequência de amostragem igual a 10khz.
A função de transferência do filtro é:
A resposta em frequência deste filtro é apresentada a seguir:

A figura a seguir mostra as formas de onda do sinal de entrada, do sinal filtrado:
Como banda de rejeição deste filtro está entre 500 e 700hz, a componente de frequência igual a 600 hz teve sua amplitudes bastante atenuada e praticamente excluída do sinal, como pôde ser observado. As restantes componentes de 200, 400, 800 e 1000hz sofreram apenas pequenas atenuações e de pouca significância.
Filtro de Média Móvel
Foi configurada uma forma de onda quadrada ruidosa na entrada e aplicados filtros de ordem 3 e 5.
Para o filtro de média móvel de ordem três, a função de transferência é esta:
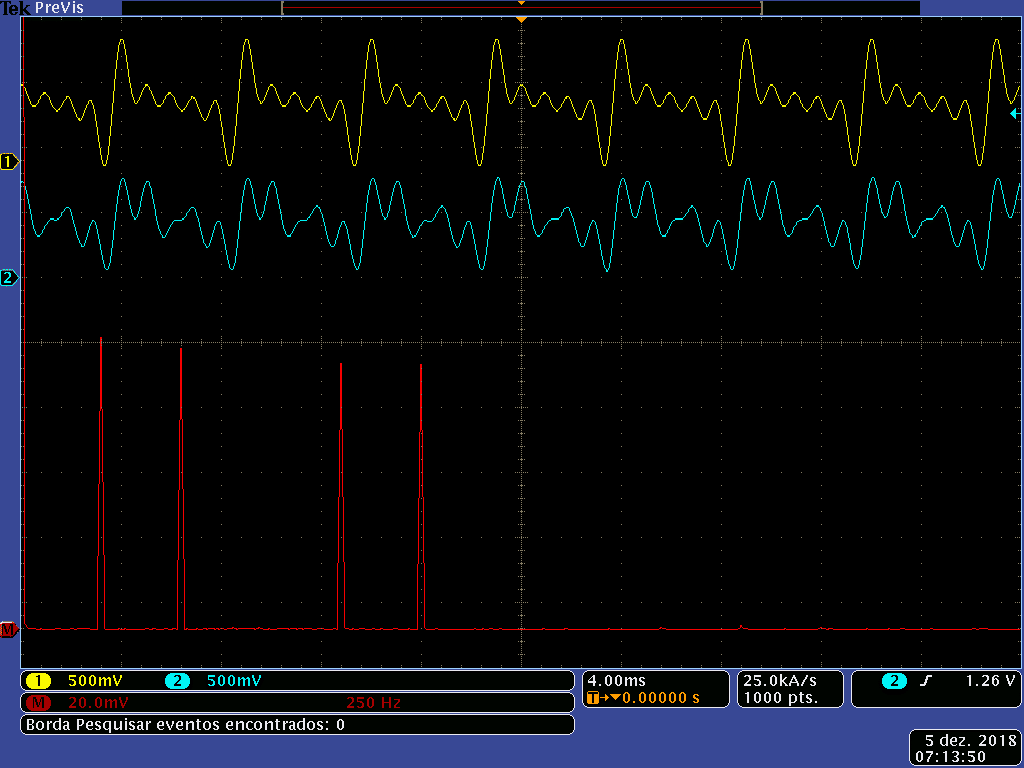
A resposta é apresentada na figura a seguir:

Houve uma pequena redução no ruído do sinal e também uma pequena deformação na região de transição dos níveis do sinal de entrada.
Para o filtro de média móvel de ordem cinco, a função de transferência é esta:
A resposta é apresentada na figura a seguir:

Foi observada uma maior redução no ruído do sinal e também uma maior deformação no sinal como um todo, quando comparado ao desempenho do filtro anterior.
Conclusão
Neste artigo foram apresentados alguns filtros digitais, sua implementação. Os testes e as simulações comprovaram o funcionamento do sistema.
Um aspecto importante a ser ressaltado é que os filtros apresentados podem ser recombinados a fim de resultarem em um desempenho melhor. Dois filtros passa-baixas de primeira podem ser associados em cascata (multiplicados), por exemplo, resultando em outro de segunda ordem com maior atenuação, etc. Além disso, existem outras estruturas e topologias que possuem características diferentes, como os filtros Butterworth, por exemplo.
Nesta série de artigos foram apresentados conceitos teóricos acerca de sistemas dinâmicos, controladores e filtros. Além destes aspectos, foi discutida a implementação destes sistemas em microcontroladores, utilizando a placa FRDM KL25Z e o FreeRTOS. Outro assunto abordado foi o custo temporal do processamento das equações do sistema, que pôde ser otimizado com a aplicação do ponto fixo.
Todos os códigos podem ser acessados em meu GitHub.
Saiba Mais
Otimização do Processamento Utilizando Ponto Fixo
Referências
SMITH, Steven W. Digital Signal Processing: A Practical Guide for Engineers and Scientists. 2002. Disponível em: <https://www.dspguide.com>
OPPENHEIM, Alan V.; SCHAFER, Ronald W. Processamento em Tempo Discreto de Sinais. 3. ed. São Paulo: Pearson, 2013.













Olá, Thiago. Poderia me tirar umas dúvidas sobre o algoritmo PID?