Uma máquina de alta velocidade apresenta uma ampla tolerância para cortar um furo devido ao desgaste da ferramenta ao longo da vida útil de um equipamento. Essa tolerância compromete as etapas de fabricação subsequentes, levando a uma taxa de sucata de 15%. Essa taxa reduz o número de peças que a máquina produz em um dia, então os engenheiros a desligam para reprogramar. A próxima iteração é melhor, mas a taxa de sucata ainda é de 8,5%. Para compensar o tempo de inatividade e a sucata, a equipe decide aceitar a taxa de sucata para aumentar a velocidade de fabricação e evitar mais tempo de inatividade para reprogramação. O aumento da velocidade melhora o rendimento, mas a alta tolerância aumenta a taxa de sucata para 12%. A produção continua atrasada. Em breve, a produção estará tão atrasada que a gerência deve aprovar outro turno e horas extras.
Tempo de inatividade, reprogramar, executar, verificar, repetir.
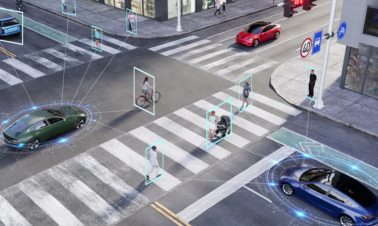
Este ciclo agora parece estar em uma espiral mortal, incapaz de acompanhar o cronograma de produção. A robótica de alta velocidade depende da precisão, e o custo de uma leitura dimensional errada pode ser catastrófico. A máquina de visão 3D revolucionou a robótica inteligente ao melhorar a qualidade, a capacidade de produção e o custo da fabricação em massa. Capaz de reagir em tempo real, essa tecnologia corrige automaticamente e fornece feedback aos operadores simultaneamente, mantendo a produção em andamento enquanto alerta proativamente os colegas humanos do robô sobre o problema.
A máquina de visão 3D recebe, processa e reage a eventos inesperados durante a operação e conclui sua tarefa sem necessidade de reprogramação para criar uma experiência totalmente automatizada. A seguir, exploramos três tarefas de fabricação realizadas por robótica — pegar e colocar, inspeção dimensional de saída e identificação de defeitos — juntamente com como a visão 3D resolve um erro conhecido que ocorre com cada uma delas.
Pick and Place
Conforme a inspeção dimensional automatizada de saída se beneficia da precisão da visão 3D da máquina, a flexibilidade da tecnologia robótica beneficia a captura e colocação, uma etapa crítica do processo, especialmente durante um clima em que as cadeias de suprimentos em todos os lugares estão tensas. Engenheiros de software desenvolvem algoritmos para detectar, alcançar, agarrar, mover e colocar um item para atender um pedido. O sistema de planejamento de recursos empresariais (ERP) recebe um pedido do sistema e o transmite para a robótica para retirada do produto.
Com um influxo de pedidos, o tempo perdido é receita perdida. Se a máquina tem uma força de agarre inadequada, o robô pode danificar o produto, perdendo tempo e um bem que seria vendido no processo. A imagem 3D captura uma imagem holística do produto e pode fornecer informações da sua resistência de volta ao processador em tempo real, emitindo uma resposta dinâmica para a próxima ação de captura e colocação. Em vez de se familiarizar com um desenho 2D, o robô se calibra a um modelo CAD e triangula a posição do item em tempo real. A robótica inteligente aprende e otimiza a melhor maneira de agarrar o item ao longo de muitas repetições de pegar o produto. A precisão da localização da imagem no espaço, juntamente com uma visão da integridade estrutural do produto, permite que a robótica melhore continuamente (e acelere) o atendimento de pedidos.
Inspeção Dimensional de Saída
A máquina de visão 3D é ideal para medição e inspeção dimensional. Ela utiliza sensores de imagem para registrar dados nas dimensões de altura, largura e profundidade, e localiza a posição a partir dos graus restantes de liberdade nos eixos de guinada, inclinação e rotação. Essa abordagem proporciona a precisão aprimorada necessária para controlar as dimensões do plano de tolerância com precisão. A inspeção 2D compara uma imagem plana de uma peça com um desenho de engenharia 2D ou conjunto conhecido de medidas. Com a imagem 3D, uma imagem da forma, volume ou posição de profundidade de um objeto ou recurso complementa os benefícios do 2D.
Um desafio comum na inspeção 2D é uma característica que não atende à especificação em termos de profundidade ou posição de rotação normal à superfície de visualização. Uma visão plana pode não capturar uma desvio excessivo da tolerância dimensional, passando uma peça que deveria ser rejeitada e sinalizada para que o operador verifique com o processo ou equipamento. A máquina de visão 3D coleta dados de posição ao longo de todos os seis graus de liberdade e constrói a imagem para enfrentar esse desafio. A confiança do inspetor é maior com a quantidade adicional de dados analisados, à medida que a robótica compara múltiplas versões da imagem. O software então as sobreposições para produzir uma perspectiva singular da parte ou recurso relevante em tempo real, com a robótica inteligente, em um processo que não requer intervenção humana.
Identificação de defeitos
Se a captura e colocação requer um nível de precisão em macroescala e a inspeção dimensional demanda um nível em microescala, a identificação de defeitos nas peças precisa estar em uma escala nanométrica. A taxa de produção e o ajuste/forma/função são essenciais, mas um produto defeituoso compromete a reputação e imagem da sua empresa. Consumidores e clientes ficam mais do que felizes em deixar uma avaliação negativa se um produto estiver com defeito. O mercado está muito avançado para comprometer a integridade do produto, e um defeito que os engenheiros de qualidade não conseguem detectar apresenta um enorme risco de perda de participação no mercado.
A multiplicidade de abordagens para coletar imagens 3D de uma peça também pode descrever a geometria e localização de um defeito do produto. Esses defeitos podem se manifestar como inconsistências de densidade inesperadas devido à não homogeneidade do material, peças internas quebradas, material de suporte residual remanescente em uma peça fabricada por adição, ou qualquer coisa entre elas. Além da precisão dimensional, os engenheiros de garantia de qualidade podem definir um conjunto de critérios de sucesso para aprovar a peça. Uma peça defeituosa pode aumentar a taxa de sucata, reduzir a capacidade de produção e aumentar o risco de falhas em campo se os engenheiros não a abordarem. A imagem que a máquina de visão 3D coleta, analisa e transmite informações aos operadores, que os alertam imediatamente sobre o problema. Os dados coletados pelos robôs fornecem aos engenheiros dados valiosos em tempo real que eles podem usar para resumir a frequência, consistência e localização dos defeitos para análise da causa raiz. A identificação precoce de um defeito do produto é fundamental para reduzir o risco de produção e manter o cronograma de fabricação.
Conclusão
Como acontece em qualquer processo de alto volume e capital intensivo, as máquinas se desgastam com o tempo. Essa realidade significa que você precisa se preparar para variáveis de processo inesperadas que possam interromper a produção. Máquinas que utilizam essa tecnologia disruptiva podem absorver variáveis e obstáculos imprevistos, navegando por eles e completando suas tarefas sem a necessidade de reprogramação. Quanto mais informações você obter durante a operação, maior será a probabilidade de chegar a uma solução mais rapidamente.
A máquina de visão 3D é uma forte aliada nessa busca por condições de processo com maiores informações. Ela coleta significativamente mais dados do que seu equivalente 2D e os utiliza para criar e implementar imagens completas durante a fabricação em massa. Essas imagens podem ajudar a guiar as máquinas para convergir posições de aplicação de captura e colocação e melhorar a inspeção dimensional de saída adicionando informações nas direções dos eixos de profundidade e rotação. Elas também podem identificar defeitos de produtos massivamente prejudiciais que poderiam levar a recalls ou problemas de segurança.
A máquina de visão 3D está ganhando popularidade como parte da Internet das Coisas (IoT) ao executar respostas dinâmicas sem reprogramação. Embora ainda não tenha alcançado uma ampla popularidade, é esperado que a tecnologia avance rapidamente de uma novidade para um item comum. As empresas continuarão a encurtar o ciclo de feedback entre o controle da máquina e do processo. O poder desta tecnologia continuará a crescer porque mais indústrias e processos de produção em massa se conectam.
Artigo publicado no blog da Mouser Electronics: How 3D-Machine Vision is Transforming Robotics | Empowering Innovation TogetherTraduzido pela Equipe Embarcados. Visite a página da Mouser Electronics no Embarcados