
Olá pessoal, no artigo anterior aprendemos como realizar a configuração básica da IDE uVision da Keil. Agora, neste segundo artigo, vamos aprender a como configurar corretamente os recursos de controle do core ARM7 da família de microcontroladores ARM. Para isso, iremos demonstrar de forma prática com uma abordagem na família LPC21XX e criaremos nosso primeiro programa em C.
Para isso, vamos detalhar o funcionamento dos seguintes módulos contidos no microcontrolador LPC21xx: PLL, MAM e Divisor VPB.
PLL
O PLL (Phase Locked Loop) trata-se de um multiplicador da frequência do cristal ligado externamente. Em geral, esse cristal externo, ligado ao microcontrolador, é da faixa de 8 MHz a 25 MHz. E com o PLL, podemos elevar essa frequência a até 60 MHz no núcleo do processador. O que pode ser valioso para rotinas de aquisições de dados.
O PLL possui 4 registradores especiais para configuração e é com essa configuração que podemos elevar o CCLK (Clock que chega ao núcleo do Processador) a até 60 MHz. São eles: PLLCFG, PLLCON, PLLSTAT, PLLFEED.

Os Melhores Treinamentos sobre Sistemas embarcados e IoT
Cursos com professores qualificados para acelerar sua carreira e projetos
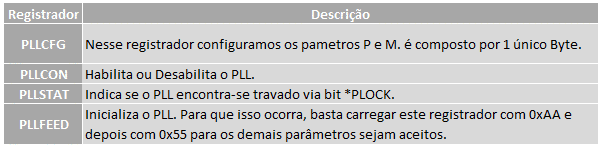
PLLCFG
O PLL é composto por dois CONTROLES: M (que é o multiplicador do PLL) e o P (que é o divisor do PLL). Devemos ajustar valores para estas duas variáveis a fim de obtermos o valor final da frequência de trabalho (limitada em 60 MHz).
A relação da fórmula que devemos equacionar para trabalhar os valores de M e P é a seguinte:
1 – CCLK = M x Osc;
Sendo: CCLK = CPU Clock; Osc = frequência do cristal ligado externamente ao Microcontrolador;
*Ou seja, para Osc = 12MHz e M = 2, temos CCLK = 24MHz;
2 – FCCO = CCLK x 2 x P
Sendo: FCCO = Frequency Current-conrolled Oscillator)
*Sendo que: 156MHz < FCCO < 320MHZ;
Uma vez definidos os valores de M e P, que satisfaçam as equações acima, utilizamos estes valores para formar o Byte do Registrador PLLCFG, da seguinte forma:

Onde MSEL representa os possíveis valores de M e PSEL representa os possíveis valores de P. Estes possíveis valores de M e P são dados de acordo com a tabela abaixo:
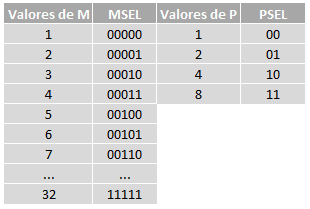
Abaixo uma planilha com alguns possíveis valores para M e P. Apenas como exemplo:

PLLCON
Esse registrador habilita o modulo PLL.

PLLFEED
Após a configuração de todos os registradores citados acima, devemos carregar o Registrador PLLFEED para que todas essas configurações no módulo PLL se iniciem.
A sequência deve ser (SEMPRE!):
- Carregar o valor 0xAA;
- Em seguida carregar o valor 0x55;
Pronto. Todas as configurações definidas para o módulo PLL são carregadas e passam a estar ativadas.
MAM
MAM (Memory Acceralator Module) coloca parte da memória Flash em uma área da RAM para acesso rápido já que o acesso à memória Flash é um barramento de no máximo 20 MHz e o núcleo ARM pode chegar a 60 MHz.
Divisor VPB
O Divisor VPB atua realizando uma divisão do sinal de Clock após o PLL. Mas não altera a frequência que chega ao núcleo do processador. Só atua sobre a frequência que chega ao barramento VPB (VLSI Peripheral Bus). Dessa forma podemos ter um processador rodando a uma alta frequência, mas com periféricos que podem rodar a uma baixa frequência caso seja solicitado. A divisão pode ser feita por 1, 2 ou 4.
Costumo utilizar a função abaixo para a configuração inicial de um microcontrolador ARM.
static void systemInit(void)
{
//--- Habilitando e ativando o PLL (Phase Locked Loop) ---
// a. Configurando multiplicador e divisor (M e P)
// O Valor de M esta definido em config.h
/*Configuraзгo do valor de P
PSEL1 PSEL0 P
0 0 1
0 1 2
1 0 4
1 1 8 */
PLL0CFG = MSEL | (0<<PSEL1) | (1<<PSEL0);
// b. Ativando PLL
PLL0CON = (1<<PLLE);
// c. Sequencia de acionamento
PLL0FEED = PLL_FEED1;
PLL0FEED = PLL_FEED2;
// d. aguarda o PLL estar travado via bit PLOCK (PLOCK bit is set if locked)
while (!(PLL0STAT & (1<<PLOCK)));
// e. Ativa (e habilita) PLL
PLL0CON = (1<<PLLE) | (1<<PLLC);
// f. Sequencia de acionamento
PLL0FEED = PLL_FEED1;
PLL0FEED = PLL_FEED2;
// --- Configura e ativa a MAM (Memory Accelerator Module) ---
// a. start change by turning of the MAM (redundant)
MAMCR = 0;
// b. set MAM-Fetch cycle to 3 cclk as recommended for >40MHz
MAMTIM = MAM_FETCH;
// c. enable MAM
MAMCR = MAM_MODE;
// --- set VPB speed ---
VPBDIV = VPBDIV_VAL;
// --- map INT-vector ---
//#if defined(RAM_RUN)
// MEMMAP = MEMMAP_USER_RAM_MODE;
//#elif defined(ROM_RUN)
// MEMMAP = MEMMAP_USER_FLASH_MODE;
//#else
//#error RUN_MODE not defined!
//#endif
}
Junto com as seguintes definições:
#define FOSC 12000000 #define Fcclk (FOSC * 5) #define Fpclk (Fcclk / 4) * 1 #define PLL_M 5 // #define MSEL (PLL_M-1) #define PSEL0 5 #define PSEL1 6 #define PLLE 0 #define PLLC 1 #define PLOCK 10 #define PLL_FEED1 0xAA #define PLL_FEED2 0x55 /*MAM(Memory Accelerator Module) Ц Definiчуo: MAM fully enabled = MAM-Mode 2 MAMCR Ц 00 = MAM esta desabilitado (Default) 01 = Funcionamento parcial do MAM 10 = Ativa todas as funчїes do MAM 11 =- System-Clock cclk=24MHz -> 2 CCLKs are proposed as fetch timing MAMTIM Ц Numero de cicles para acesso a memєria flash */ #define MAM_MODE 2 #define MAM_FETCH 2 /*VPB (VЕ Pheriphal Bus) Ц Definiчуo: VPB serс definido para mesma frequncia do nucleo -> devider VPBDIV=1 => pclk = cclk = 24MHz */ #define VPBDIV_VAL 1
Abaixo, um exemplo de código completo. O programa executa um simples pisca Led onde já podemos ver a configuração básica do microcontrolador junto com uma simples rotina de temporização:
No próximo artigo, estaremos abordando alguns recursos extras dos periféricos e dando maiores detalhes do uso do GPIO (General Purpose Input Output). Até lá!













