Olá caro leitor, tudo bem? Vamos dar continuidade à série de artigos sobre desenvolvimento de Kernel. No último artigo, Meu Kernel Minha Vida, foram apresentados os conceitos básicos de kernel cooperativo e o código-fonte do projeto desenvolvido. Para este artigo serão apresentados conceitos básicos de kernel preemptivo do tipo Round-Robin, o código-fonte do kernel desenvolvido e a aplicação de demonstração.
Escalonador Round-Robin
O Round-Robin é um algoritmo escalonador de tarefas (processos) que consiste em dividir o tempo de uso da CPU (Central Processing Unit). Cada processo recebe uma fatia de tempo, esse tempo é chamado Time-Slice, também conhecido por Quantum. Os processos são todos armazenados em Fila (Buffer) circular. O escalonador executa cada tarefa pelo tempo determinado pelo Time-Slice e ao fim deste período é executada a troca de contexto, onde o próximo processo fila passa a ser executado pela CPU até percorrer o período do Time-Slice. Após percorrer todos os processos da fila, essas atividades se repetem e o escalonador aponta para a primeira tarefa. A figura a seguir ilustra bem todo esse processo.

Kernel Preemptivo
Como dito anteriormente, trata-se de um kernel preemptivo do tipo Round-Round. Antes de descrever sobre o projeto desenvolvido, serão apresentadas as principais características de sistema preemptivo, são elas:
- O uso de maneira uniforme da CPU entre os processos da aplicação;
- Troca de contexto.
A troca de contexto é um recurso computacional de armazenar e restaurar o estado de uma tarefa em um sistema de múltiplos processos. Por um lado, é uma característica positiva de um sistema preemptivo. Mas a implementação desse recurso é mais complexo em comparação ao sistema cooperativo. E sua implementação está intimamente ligada à arquitetura da CPU, pois é necessária a manipulação de registradores específicos, que mudam de acordo com a CPU utilizada.

Os Melhores Treinamentos sobre Sistemas embarcados e IoT
Cursos com professores qualificados para acelerar sua carreira e projetos
Outro ponto que pode ser considerado como uma desvantagem nesse tipo de sistema é fazer o uso de linguagem Assembly, manipulando alguns registradores a fim de realizar a troca de contexto.
O Kernel
O kernel desenvolvido é especifico para microcontroladores ARM Cortex-M0. Para utilizar esse código-fonte em outra arquitetura é necessário realizar uma serie de mudanças para realizar a troca de contexto.
Os microcontroladores ARM Cortex-M0/M3/M4/M7 possuem alguns recursos que facilita o desenvolvimento de sistemas operacionais. São as seguintes interrupções:
- SysTick: é um “Timer” periódico utilizado como base de tempo. No artigo passado já utilizamos essa interrupção;
- PendSV (Pendable SerVice): é uma interrupção que a arquitetura ARM Cortex-M fornece para o uso dos sistemas operacionais realizar a troca de contexto;
- SVCall (SuperVisor Call): São chamadas de supervisor, normalmente usadas para solicitar operações privilegiadas.
A outra característica importante de se destacar nos microcontroladores ARM Cortex-M é que eles possuem dois ponteiros de pilha (Stack Pointers):
- MSP (Main Stack Pointer): Ponteiro de pilha principal, utilizado para a inicialização do sistema e na função main(). E as interrupções do sistema também fazem uso deste ponteiro;
- PSP (Process Stack Pointer): Ponteiro de pilha de processo, usado para manipular os processos / tarefas em sistema operacional.
O projeto desenvolvido faz uso das interrupções SysTick como base de tempo do kernel. Para realizar as trocas de contexto entre as tarefas é utilizada a interrupção PendSV em conjunto com PSP, passando o endereço de memória que contém as instruções da próxima tarefa.
O código-fonte do kernel foi apresentado no artigo Context Switch on the ARM Cortex-M0 do Adam Heinrich em seu Blog com algumas alterações. O projeto desenvolvido para o STM32F0DISCOVERY, utilizando o STM32Cube MX em conjunto com Atollic TrueSTUDIO for STM32 9.0.0.
Das alterações que realizei, a mais relevante se encontra na API que adiciona os processos ao kernel. No código-fonte original, a alocação de memória é feita através de Array (vetor), e parâmetros são passados à função. A seguir temos trechos do código-fonte apresentado por Adam Heinrich em seu artigo:
//main.c static os_stack_t stack1[128]; os_task_init(&task1_handler, stack1, 128);
//os.c bool os_task_init(void (*handler)(void), os_stack_t *p_stack, uint32_t stack_size)
No código-fonte apresentado neste artigo, essa operação é feita na própria API, sem a necessidade de receber um vetor como parâmetro. A alocação de memoria é realizada utilizando a função malloc(), como pode ser observado no trecho de código-fonte abaixo.
//main.c Kernel_Init(); Kernel_Add_Task(&app_task_push_button,NULL,SIZE_TASK_PUSH_BUTTON);
//kernel.c
bool Kernel_Add_Task(void (*handler)(void *p_params), void *p_task_params,uint32_t size)
{
//...
uint32_t *stack_size;
stack_size = malloc(size * sizeof(uint32_t))
O funcionamento do kernel é bem simples, o mesmo contém API’s (Application Programming Interface) para inicializar, adicionar as tarefas da aplicação e para iniciar o escalonador do kernel. A seguir temos os protótipos das funções presente no kernel.
//kernel.h bool Kernel_Init(void); bool Kernel_Add_Task(void (*handler)(void *p_params), void *p_task_params,uint32_t size); bool Kernel_Start(uint32_t systick_ticks);
Uma vez inicializado o Kernel, são adicionadas as tarefas ao Buffer circular. O escalonador assume o controle e passa a gerenciar o processo que deve ser executado pela CPU. O gerenciamento dos processos se dá início pela API “Kernel_Start”, onde é configurada a utilização do Ponteiro de Pilha de Processo.
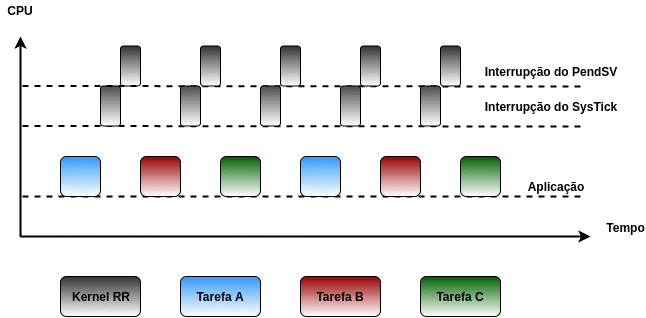
A troca de contexto entre as tarefas é realizada a cada ocorrência da interrupção do SysTick, onde é incrementado o index do Buffer e, em seguida, é disparado o Trigger gerar a interrupção do PendSV. O algoritmo que é executado quando ocorre a interrupção do PendSV é: salvar o contexto da tarefa que estava em execução e restaurar as informações da próxima tarefa a ser processada pela CPU. A figura a seguir ilustra com mais detalhes o funcionamento do Kernel.
A seguir será apresentado o código-fonte do Kernel (arquivos kernel.c, kernel.h e kernel.s).
/*
* kernel.c
*
* Created on: 29 de abr de 2018
* Author: evandro
*/
#include "../inc/kernel.h"
static KernelStr m_task_table;
static KernelState m_state = KERNEL_STATE_DEFAULT;
volatile TaskStr *kernel_curr_task;
volatile TaskStr *kernel_next_task;
bool Kernel_Init(void)
{
if (m_state != KERNEL_STATE_DEFAULT)
return false;
memset(&m_task_table, 0, sizeof(m_task_table));
m_state = KERNEL_STATE_INITIALIZED;
return true;
}
bool Kernel_Add_Task(void (*handler)(void *p_params), void *p_task_params,uint32_t size)
{
if (m_state != KERNEL_STATE_INITIALIZED && m_state != KERNEL_STATE_TASKS_INITIALIZED)
return false;
if (m_task_table.size >= KERNEL_CONFIG_MAX_TASKS-1)
return false;
uint32_t *stack_size;
stack_size = malloc(size * sizeof(uint32_t));
uint32_t stack_offset = (size * sizeof(uint32_t));
TaskStr *p_task = &m_task_table.tasks[m_task_table.size];
p_task->handler = handler;
p_task->p_params = p_task_params;
p_task->sp = (uint32_t)(stack_size+stack_offset-16);
p_task->status = KERNEL_TASK_STATUS_IDLE;
stack_size[stack_offset-1] = 0x1000000;
stack_size[stack_offset-2] = (uint32_t)handler;
stack_size[stack_offset-8] = (uint32_t)p_task_params;
#if KERNEL_CONFIG_DEBUG
uint32_t base = (m_task_table.size+1)*1000;
p_stack[stack_offset-4] = base+12; /* R12 */
p_stack[stack_offset-5] = base+3; /* R3 */
p_stack[stack_offset-6] = base+2; /* R2 */
p_stack[stack_offset-7] = base+1; /* R1 */
/* p_stack[stack_offset-8] is R0 */
p_stack[stack_offset-9] = base+7; /* R7 */
p_stack[stack_offset-10] = base+6; /* R6 */
p_stack[stack_offset-11] = base+5; /* R5 */
p_stack[stack_offset-12] = base+4; /* R4 */
p_stack[stack_offset-13] = base+11; /* R11 */
p_stack[stack_offset-14] = base+10; /* R10 */
p_stack[stack_offset-15] = base+9; /* R9 */
p_stack[stack_offset-16] = base+8; /* R8 */
#endif /* KERNEL_CONFIG_DEBUG */
m_state = KERNEL_STATE_TASKS_INITIALIZED;
m_task_table.size++;
return true;
}
bool Kernel_Start(uint32_t systick_ticks)
{
if (m_state != KERNEL_STATE_TASKS_INITIALIZED)
return false;
NVIC_SetPriority(PendSV_IRQn, 0xff);
NVIC_SetPriority(SysTick_IRQn, 0x00);
SysTick_Config(systick_ticks);
kernel_curr_task = &m_task_table.tasks[m_task_table.current_task];
m_state = KERNEL_STATE_STARTED;
__set_PSP(kernel_curr_task->sp+64);
__set_CONTROL(0x03);
__ISB();
kernel_curr_task->handler(kernel_curr_task->p_params);
return true;
}
void Kernel_Systick_Callback(void)
{
kernel_curr_task = &m_task_table.tasks[m_task_table.current_task];
kernel_curr_task->status = KERNEL_TASK_STATUS_IDLE;
// Select next task:
m_task_table.current_task++;
if (m_task_table.current_task >= m_task_table.size)
m_task_table.current_task = 0;
kernel_next_task = &m_task_table.tasks[m_task_table.current_task];
kernel_next_task->status = KERNEL_TASK_STATUS_ACTIVE;
// Trigger PendSV which performs the actual context switch:
SCB->ICSR |= SCB_ICSR_PENDSVSET_Msk;
}
/*
* kernel.h
*
* Created on: 29 de abr de 2018
* Author: evandro
*/
#ifndef KERNEL_INC_KERNEL_H_
#define KERNEL_INC_KERNEL_H_
#include <stdint.h>
#include <stdbool.h>
#include <string.h>
#include <stdlib.h>
#include "stm32f0xx_hal.h"
#include "stm32f0xx.h"
#define KERNEL_CONFIG_MAX_TASKS 8
#define KERNEL_CONFIG_DEBUG 0
typedef enum
{
KERNEL_TASK_STATUS_IDLE = 1,
KERNEL_TASK_STATUS_ACTIVE,
}TaskStatus;
typedef struct
{
volatile uint32_t sp;
void (*handler)(void *p_params);
void *p_params;
volatile TaskStatus status;
}TaskStr;
typedef enum
{
KERNEL_STATE_DEFAULT = 1,
KERNEL_STATE_INITIALIZED,
KERNEL_STATE_TASKS_INITIALIZED,
KERNEL_STATE_STARTED,
}KernelState;
typedef struct
{
TaskStr tasks[KERNEL_CONFIG_MAX_TASKS];
volatile uint32_t current_task;
uint32_t size;
}KernelStr;
bool Kernel_Init(void);
bool Kernel_Add_Task(void (*handler)(void *p_params), void *p_task_params,uint32_t size);
bool Kernel_Start(uint32_t systick_ticks);
void Kernel_PendSV_Callback(void);
void Kernel_Systick_Callback(void);
#endif /* KERNEL_INC_KERNEL_H_ */
/*
* PendSV_Handler
*/
.syntax unified
.cpu cortex-m0
.fpu softvfp
.thumb
.global PendSV_Handler
.type PendSV_Handler, %function
PendSV_Handler:
cpsid i
mrs r0, psp
subs r0, #16
stmia r0!,{r4-r7}
mov r4, r8
mov r5, r9
mov r6, r10
mov r7, r11
subs r0, #32
stmia r0!,{r4-r7}
subs r0, #16
ldr r2, =kernel_curr_task
ldr r1, [r2]
str r0, [r1]
ldr r2, =kernel_next_task
ldr r1, [r2]
ldr r0, [r1]
ldmia r0!,{r4-r7}
mov r8, r4
mov r9, r5
mov r10, r6
mov r11, r7
ldmia r0!,{r4-r7}
msr psp, r0
ldr r0, =0xFFFFFFFD
cpsie i
bx r0
.size PendSV_Handler, .-PendSV_Handler
Aplicação de demonstração
Para demonstrar o funcionamento do kernel, foi desenvolvida uma aplicação com três tarefas. A primeira tarefa ficará executando o algoritmo LED Blinking no LED verde. A segunda tarefa será responsável pelo acionamento do LED azul. E a última tarefa executará o algoritmo de leitura do Push Button.
A seguir é apresentado o código-fonte da aplicação, composto pelo main.c, onde temos as funções de inicialização do kernel, e pelos arquivos app.c e app.h.
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32f0xx_hal.h"
#include "gpio.h"
/* USER CODE BEGIN Includes */
#include "kernel/inc/kernel.h"
#include "app/inc/app.h"
/* USER CODE END Includes */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* Private variables ---------------------------------------------------------*/
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* Private function prototypes -----------------------------------------------*/
/* USER CODE END PFP */
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
*
* @retval None
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration----------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
Kernel_Init();
Kernel_Add_Task(&app_task_push_button,NULL,SIZE_TASK_PUSH_BUTTON);
Kernel_Add_Task(&app_task_led_green,(void*)TIME_LED_GREEN,SIZE_TASK_LED_GREEN);
Kernel_Add_Task(&app_task_led_blue,NULL,SIZE_TASK_LED_BLUE);
Kernel_Start(SystemCoreClock);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct;
RCC_ClkInitTypeDef RCC_ClkInitStruct;
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = 16;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL12;
RCC_OscInitStruct.PLL.PREDIV = RCC_PREDIV_DIV1;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_1) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
/**Configure the Systick interrupt time
*/
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000);
/**Configure the Systick
*/
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);
/* SysTick_IRQn interrupt configuration */
HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @param file: The file name as string.
* @param line: The line in file as a number.
* @retval None
*/
void _Error_Handler(char *file, int line)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
while(1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/**
* @}
*/
/**
* @}
*/
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
/*
* app.c
*
* Created on: 29 de abr de 2018
* Author: evandro
*/
#include "../inc/app.h"
static bool flag_push_button = false;
static void app_flag_push_button_set(bool flag);
static bool app_flag_push_button_get(void);
static void app_flag_push_button_set(bool flag)
{
flag_push_button = flag;
}
static bool app_flag_push_button_get(void)
{
return flag_push_button;
}
void app_task_push_button(void *parameters)
{
while(1)
{
if(HAL_GPIO_ReadPin(GPIOA,B1_Pin) == GPIO_PIN_SET)
{
app_flag_push_button_set(true);
}
}
}
void app_task_led_green(void *parameters)
{
static uint32_t time_delay = 0;
uint32_t i = (uint32_t)parameters;
while(1)
{
time_delay++;
if(time_delay >= i)
{
time_delay = 0;
HAL_GPIO_TogglePin(GPIOC, LD3_Pin);
}
}
}
void app_task_led_blue(void *parameters)
{
uint32_t i = 0;
while(1)
{
if(app_flag_push_button_get() == true)
{
app_flag_push_button_set(false);
HAL_GPIO_TogglePin(GPIOC, LD4_Pin);
}
}
}
/* * app.h * * Created on: 29 de abr de 2018 * Author: evandro */ #ifndef APP_INC_APP_H_ #define APP_INC_APP_H_ #include <stdio.h> #include <stdbool.h> #include "main.h" #include "stm32f0xx_hal.h" #include "gpio.h" #include "main.h" #define TIME_LED_BLUE 200000 #define TIME_LED_GREEN 500000 #define SIZE_TASK_LED_GREEN (uint32_t)(128*2) #define SIZE_TASK_LED_BLUE (uint32_t)(128*2) #define SIZE_TASK_PUSH_BUTTON (uint32_t)(128*2) void app_task_led_green(void *parameters); void app_task_led_blue(void *parameters); void app_task_push_button(void *parameters); #endif /* APP_INC_APP_H_ */
Conclusão
Neste segundo artigo da série Meu Kernel Minha Vida foram apresentados os conceitos básicos sobre kernel preemptivo e do escalonador Round-Robin. Também foi apresentado o código-fonte do kernel e da aplicação de demonstração. O objetivo foi trazer a você, caro leitor, mais uma alternativa para o desenvolvimento de firmware.
O código-fonte do projeto com a aplicação e kernel está disponível no meu Github. E fica aqui o meu convite a você caro leitor, que se interessou pelo assunto, a contribuir com o projeto, testando e aperfeiçoando o mesmo.
Saiba mais
Desenvolvendo com o Zephyr RTOS: Controlando o Kernel
Implementando elementos de RTOS no Arduino
Desenvolvendo um RTOS: Introdução
Referências
MCU on Eclipse – ARM Cortex-M, Interrupts and FreeRTOS: Part 1
MCU on Eclipse – ARM Cortex-M, Interrupts and FreeRTOS: Part 2
MCU on Eclipse – ARM Cortex-M, Interrupts and FreeRTOS: Part 3
Adam Heinrich – Context Switch on the ARM Cortex-M0
GitHub – Adam Heinrich – Context Switch on the ARM Cortex-M0















Excelente artigo Evandro! Meus parabéns!
Valeu! Muito Obrigado Lucas Zampar.