Como usar o sensor ToF para projetar LiDAR 2D
O sensor Time-of-Flight (ToF) mede a distância calculando o tempo que um pulso de luz leva para viajar da fonte ao alvo observado e depois retornar ao detector. A fórmula a seguir calcula o tempo de voo:
Valor da distância = tempo de viagem do fóton/ (2 x velocidade da luz)
Para saber mais sobre a tecnologia ToF, clique aqui.
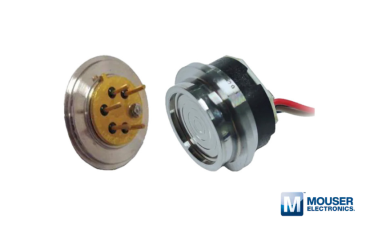
Os sensores ToF podem ser usados para fazer um Lidar, que significa “Light Detection and Ranging”, esta é uma técnica de cálculo pela qual a luz é usada para medir a distância até o objeto mais próximo. Um LiDAR 2D usa um feixe de luz em movimento para escanear um objeto em duas dimensões para fornecer informações de movimento rotacional e distância. O sensor ToF usado em um LiDAR 2D mede os valores em ordem sequencial em um intervalo de tempo igual entre as medições. O sensor tem um campo de visão (FoV) que define o tamanho da região de interesse (ROI) na matriz receptora. Conforme ilustrado na figura 1, vários sensores ToF podem ser fixados de forma circular, inclinando cada sensor em algum ângulo e conectando em paralelo para executar uma varredura surround 2D LiDAR.

Um sensor ToF pode ser baseado em uma interface como I2C, UART, CAN ou qualquer interface serial para ser conectada diretamente a um controlador host como uma placa ARDUINO ou STM32. Ele também pode ser conectado a um computador host, como Raspberry Pi ou a um computador baseado em Windows, usando um conversor UART para USB ou serial. A Figura 2 mostra um diagrama de blocos geral para fazer a interface de um sensor ToF com uma placa controladora e um computador. Para saber mais sobre a interface serial, clique aqui.

Por exemplo, nove sensores ToF de longa distância VL53L1X podem ser conectados em paralelo, criando um mapa de profundidade de ambiente simples com um FoV de 180°. Cada um dos nove sensores tem um FoV de 20° para cobrir o FoV total de 180° do LiDAR, e o firmware é programado para fornecer 13 pontos de dados por sensor. Assim, uma varredura completa de 180° criaria um total de 117 pontos de dados. A estimativa de tempo é de cerca de 12mS por ‘zona’ do sensor, o que equivaleria a um tempo total de varredura de aproximadamente 160mS, dando uma taxa de quadros de pouco mais de 6 FPS. É possível desenvolver uma aplicação final usando a API ULD VL53L1X (interface de programação de aplicação de driver ultra-lite). Possui um conjunto de funções C controlando um único sensor ou vários sensores para inicialização e alcance. Essa API estruturada pode ser compilada em qualquer plataforma por meio de uma camada de plataforma bem isolada principalmente para acesso I²C de baixo nível.
A configuração de hardware envolve o uso do P-NUCLEO-53L1A1 combinado com a placa de expansão X-NUCLEO-53L1A1 e o STM32F401RE NUCLEO, conforme mostrado na figura 3. Os nove sensores conectados às placas breakout VL53L1X compartilham interface I2C idêntica, terra e energia . Cada pino de reinicialização do sensor se conecta a um pino GPIO do host alocado.

Contato da Newark no Brasil
Para mais informações e adquirir componentes contate a LATeRe , representante da Newark, pelo Telefone (11) 4066-9400 ou e-mail: vendas@laterebr.com.br
* Texto originalmente publicado em: link