
A eletrônica de potência está presente nas mais diversas aplicações, desde geração de energia eólica até fonte de computadores, em alta potência e também baixa potência, abrangendo os mais diversos tipos de aplicações.
Um conversor muito comum e bastante utilizado é o BUCK, utilizado para baixar a tensão em circuitos, prometendo também em muitos dos casos uma eficiência maior de conversão.
Este estudo compreende a dinâmica do conversor em sua forma ideal e também alguns componentes que fazem parte da aplicação real e alteram sua forma de funcionamento.
Também será estudado o controle no domínio da frequência, sendo controle contínuo e também discretizado. Para as malhas de corrente e tensão.

Os Melhores Treinamentos sobre Sistemas embarcados e IoT
Cursos com professores qualificados para acelerar sua carreira e projetos
Circuito Buck
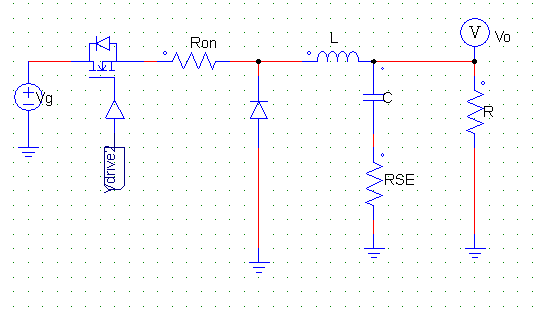
O circuito do conversor Buck, idealizado, pode ser visualizado na Figura 1, é utilizado para baixar tensões.



Este conversor possui dois estados, um com a chave fechada (Figura 2), onde a corrente da fonte energiza o indutor L, carregando o capacitor C e fornecendo corrente para a carga R. Com a chave aberta (Figura 3) a corrente do laço passa através do diodo e a fonte não fornece carga ao circuito.
Tensão e corrente no indutor (L)
A tensão no indutor quando a chave esta fechada é , e quando está aberta,. Desta maneira, tem-se em regime:, sendo D o ciclo de trabalho (razão entre tempo de chave fechada e período de chaveamento) e T o período da frequência de chaveamento.
Com a tensão do indutor determinada é possível estipular a variação de corrente no indutor, sedo que resultando em:
Considerando metade da variação da corrente no indutor, tem-se
Assumindo que a corrente em regime do capacitor é , é possível obter a seguinte equação: , no nó onde são conectados L,C e R, tem-se que logo para ambos os ciclos. Resultando em , resultando na corrente média no indutor igual a .
Desta maneira pode-se calcular a corrente de pico e mínima do indutor: e .
Ganho do conversor
Considerando a tensão do indutor em regime, , obtêm-se .
Corrente tensão e corrente no capacitor
A corrente no capacitor é para ambos os ciclos. Para o ciclo , tem-se que , analogamente para , tem-se que .
A tensão de ripple pode ser determina da seguinte maneira: .
Calculo do conversor
As especificações do conversor podem ser visualizadas na Tabela 1. As variáveis de Vg à D, foram especificadas, L, Q, C calculadas.
Tabela 1: Especificações do conversor BUCK.
|
BUCK | ||
|
Vg |
24 |
V |
|
Vo |
12 |
V |
|
R |
5 |
ohms |
|
Io |
2,4 |
A |
|
F |
50000 |
Hz |
|
T |
2E-05 |
s |
|
ΔiL |
0,3 |
A |
|
ΔvC |
0,3 |
V |
|
D |
0,5 | |
|
L |
200,00E-06 |
H |
|
Q |
1,50E-06 |
C |
|
C |
5,00E-06 |
F |



Malha de Controle para corrente iL e tensão Vo
A principal malha do conversor é a de corrente no indutor L. Basicamente o ciclo de trabalho variará e assim controlará a corrente no indutor para variar a tensão na carga. Existem malhas secundárias para controlar a tensão na carga, exercendo referência para a de corrente.
Para o diagrama de controle de Figura 7 são necessárias no mínimo, três plantas para análise dimensionamento dos controladores, sendo essas:
onde é extraída a razão de corrente no indutor pela razão cíclica sendo que a saída dessa malha é a corrente .
, para assim estipular a variação da tensão da carga, em função da corrente do indutor.
Para a referência de corrente do circuíto tem-se que , sendo assim a planta para referência é .

Função de transferência – Corrente Indutor L
Serão avaliadas duas funções de transferência, uma ideal, respectiva do circuito da Figura 1 e outra que considera a resistência da chave e do capacitor, Ron e Rse respectivamente (dito “real”), extraída da Figura 8. Ambas para extrair a função de transferência para corrente no indutor L.
Função de transferência da Figura 1:
Função de transferência da Figura 8:
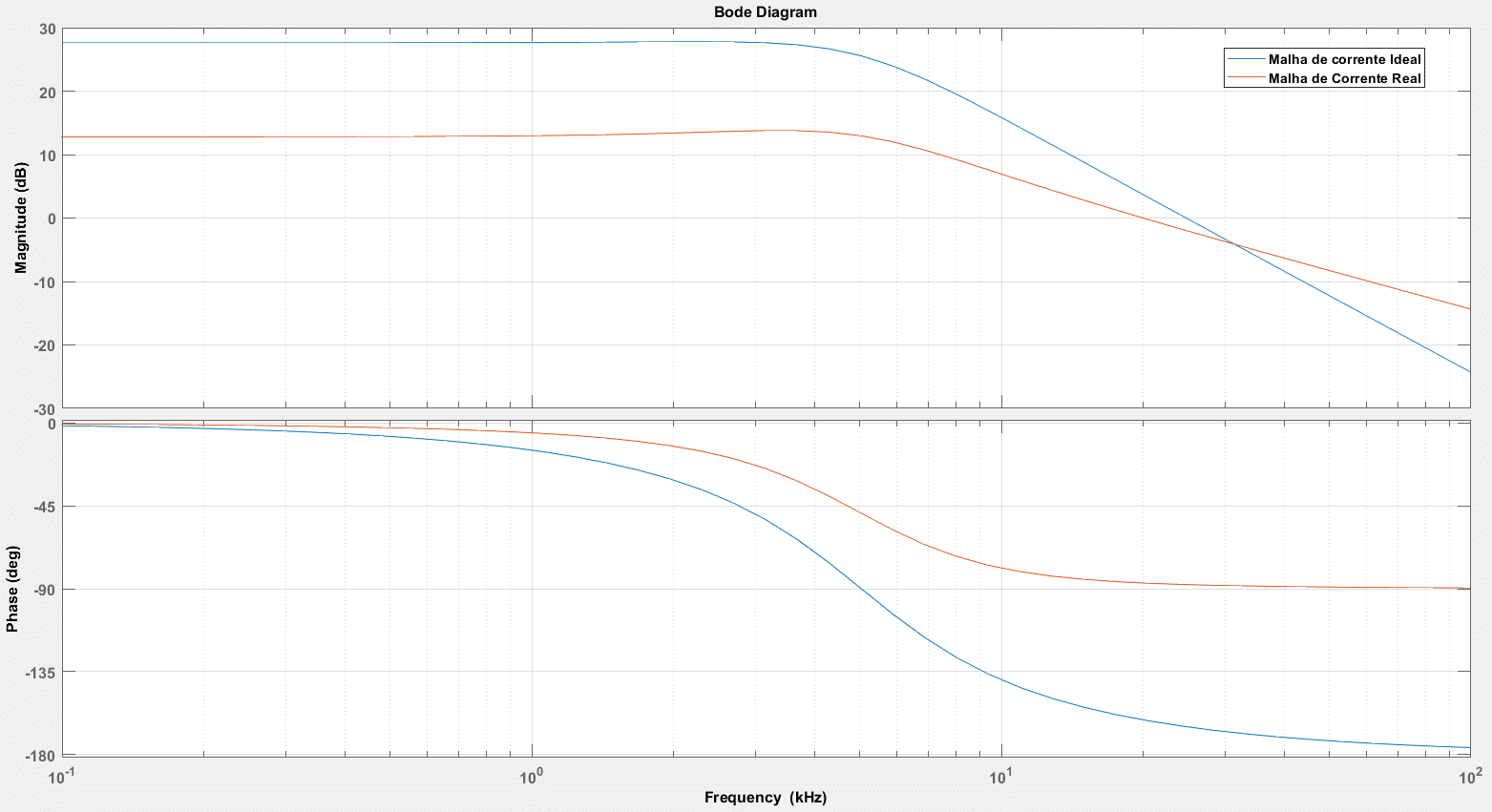
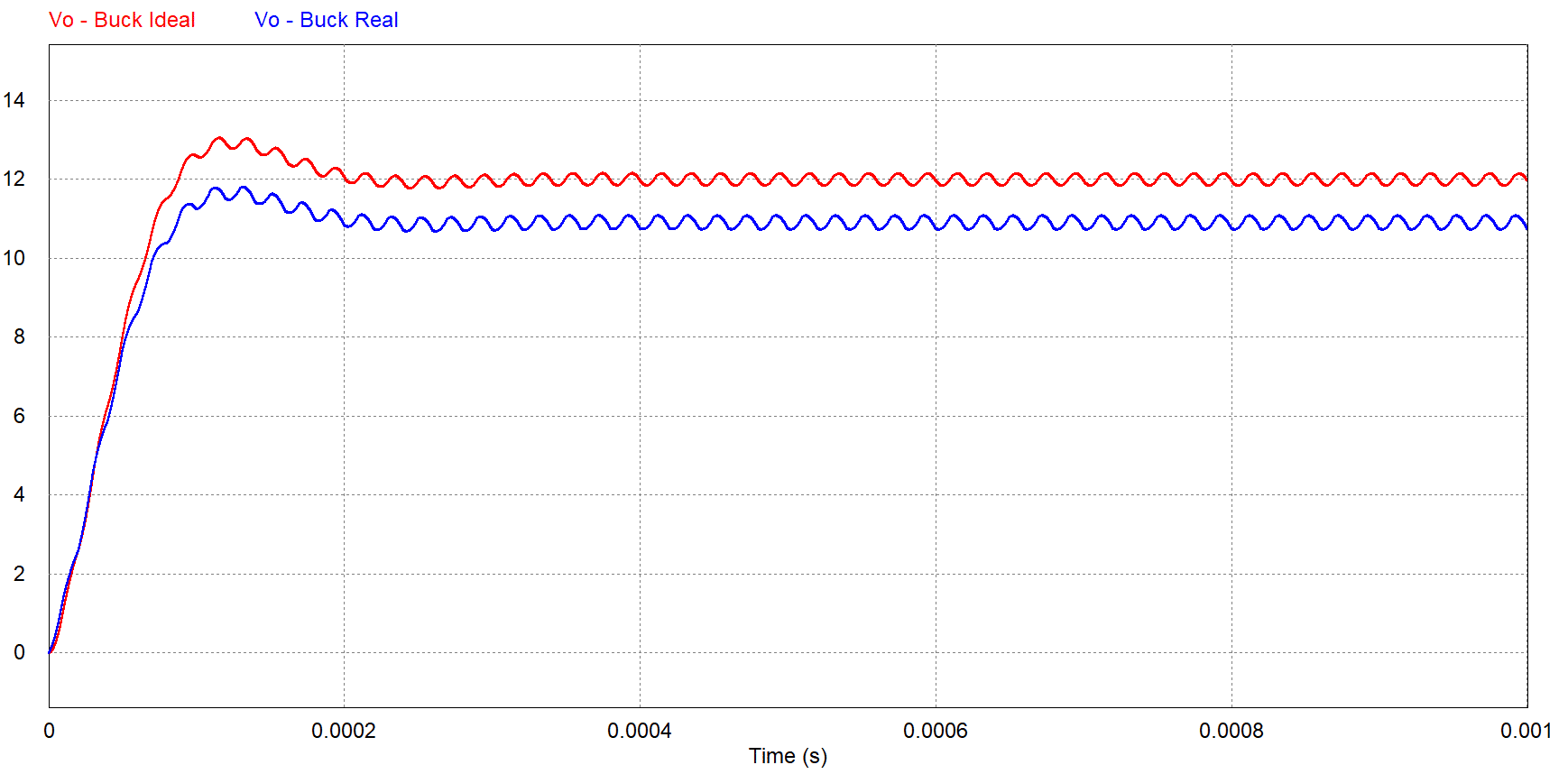
A resposta em frequência pode ser visualizada no diagrama de bode da Figura 9 e ao estímulo para ambas as funções de transferência na Figura 10.
Função de transferência – Tesão na Carga (C||R) e (C+RSE||R)
Para a tensão de carga, ambas as funções de transferência podem ser encontradas abaixo:
Função de transferência da Figura 1:
Função de transferência da Figura 8:
A resposta em frequência pode ser visualizada na Figura 11.

Controle do conversor
O controle do circuito será realizado através do domínio da frequência, inserindo compensadores, verificando ganhos e estabilidade.
Serão analisados o modelo continuo, onde o controle é realizado por um controlador PI, e outro discretizado, em código C. Apenas serão realizadas simulações para ambas as plantas, a ideal e dita “real”
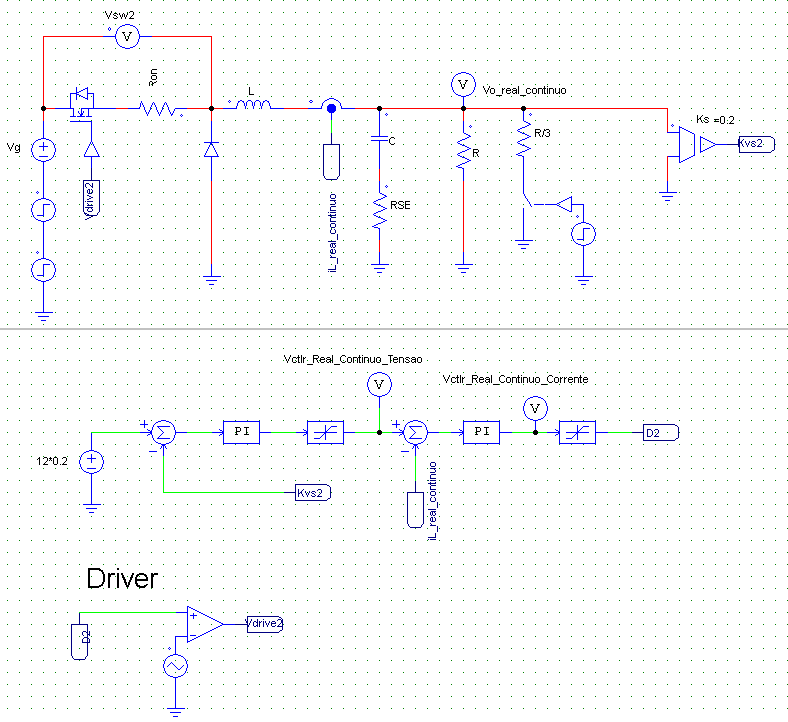
Controle Contínuo
O circuito de controle pode ser verificado na Figura 12, sendo que representa o circuito “real” em controle continuo, para o ideal basta desconsiderar a resistências Ron e RSE, ou considerar igual a zero.
A função de transferência em laço aberto para o circuito da malha de corrente é dada por (os mesmos valores são utilizados para ambas funções de transferência)):
O gráfico de bode poder ser visualizado na Figura 13.
Para realizar a análise da malha de tensão é necessário uma função de transferência com ordem superior a segunda, para simplificar, analisa-se a responta em frequência em laço fechado da malha de corrente, que pode ser visualizado na Figura 14 .
A equação de laço fechado da malha de corrente ,pode ser observada abaixo:
Através da Figura 14, verifica-se que possui ganho, e pouco significativo, apenas em baixa frequência, sendo assim essa malha será substituída por um ganho estático:, sendo que é o ganho do sensor de corrente.


Desta maneira é possível obter a função de transferência em laço aberto, para se obter a referência de corrente através da malha de tensão:
O gráfico de bode da equação acima pode ser visualizado na Figura 15.

Figura 15: Diagrama de bode para . Circuito ideal e real.
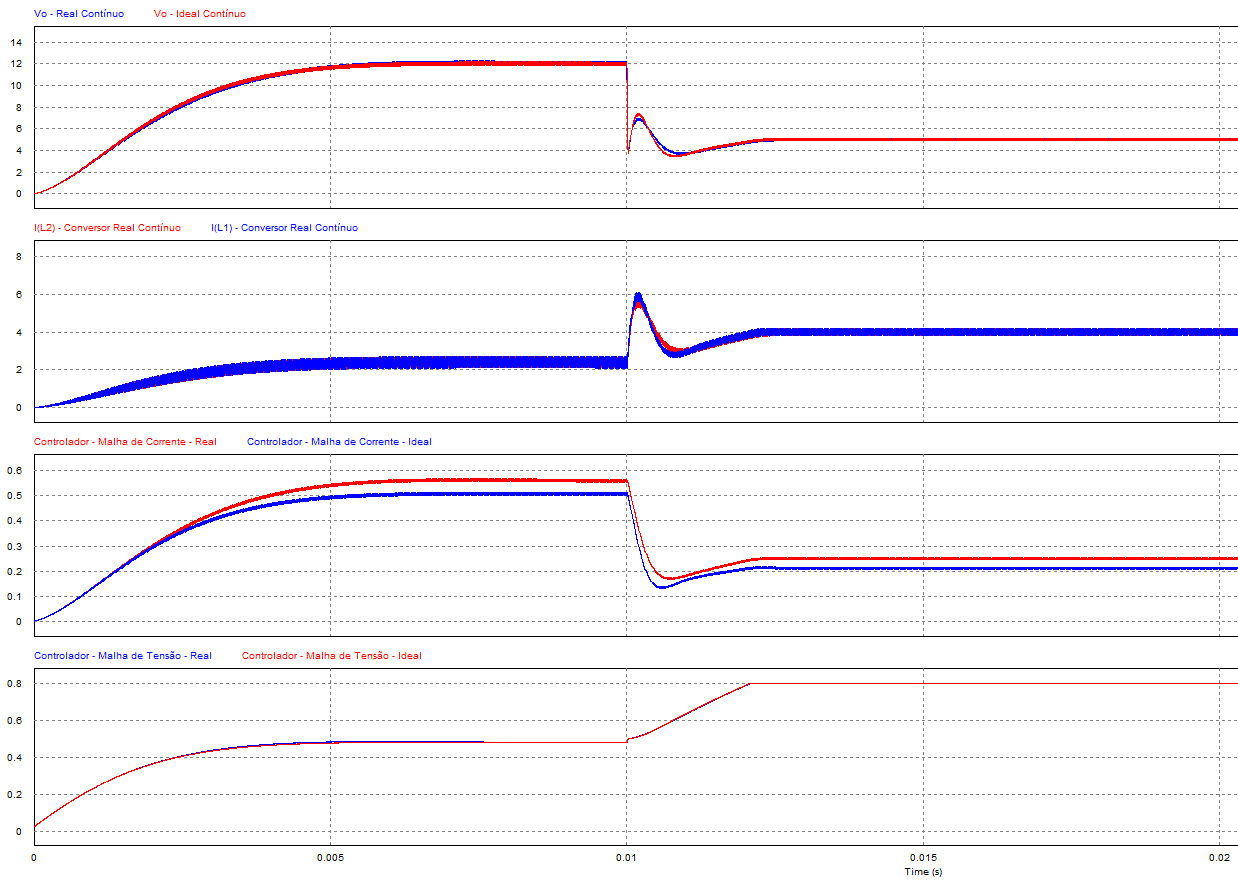
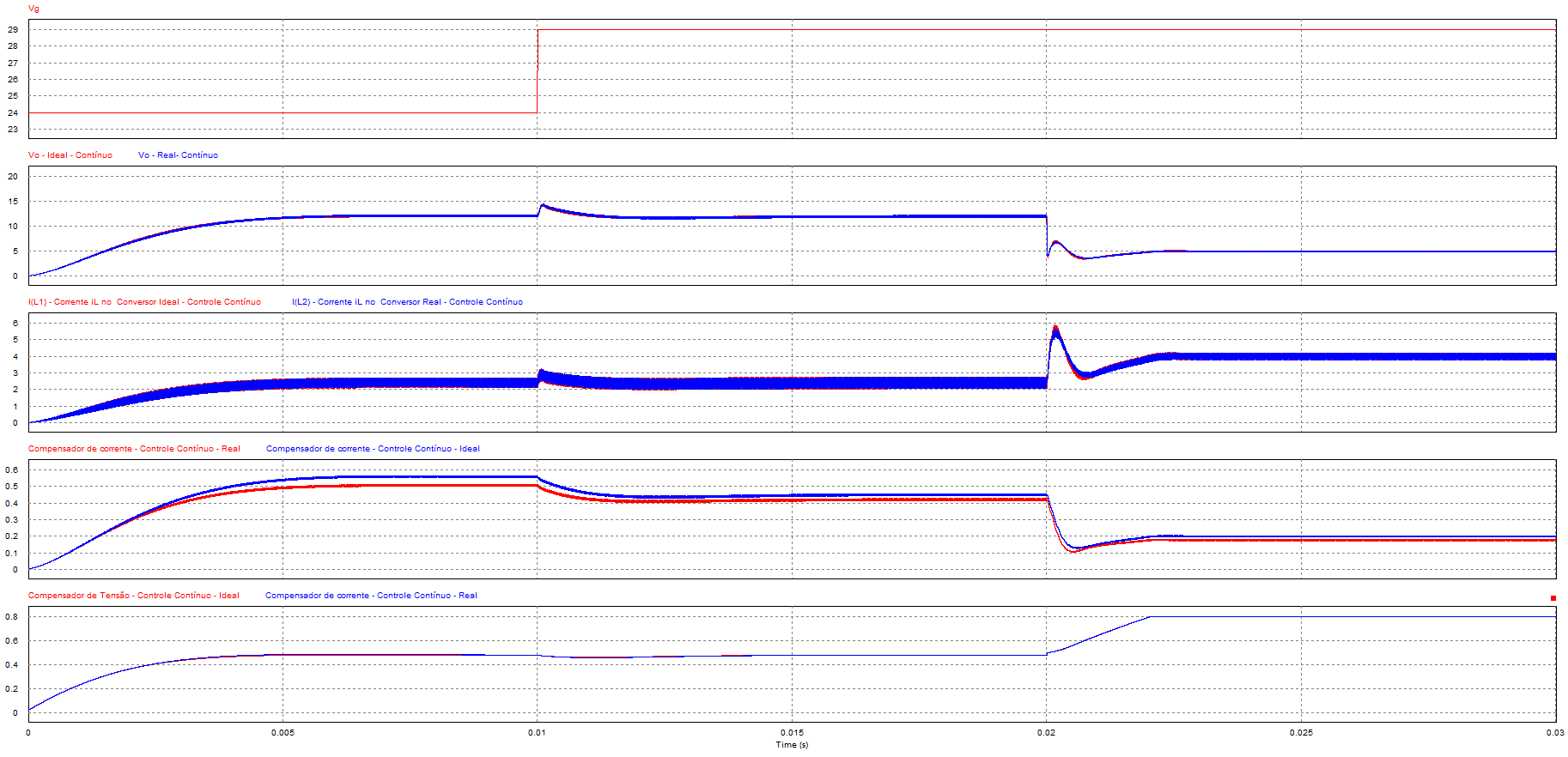
O resultado da simulação para os conversores pode ser visualizado nas Figuras 16 e 17. É verificado o comportamento em sobrecarga e também com perturbação da tensão da fonte.
Discretização dos compensadores
O compensador PI possui a seguinte resposta , no domínio da frequência.
Utilizando a transformada Z, onde e , é possível discretizar o compensador: .
Sendo, e .
Código em C para compensador de corrente do indutor
double Ek; static double Ek_1=0; double Uk; static double Uk_1=0; double vIn; double Kci; double Ts; double Wz; double a; double b; Kci=0.1; Ts=0.000005; Wz=15873; a=(2*Kci+Kci*Wz*Ts)/2; b=(-2*Kci+Kci*Wz*Ts)/2; Ek= Vref-Vout; Uk=Uk_1+Ek*a+Ek_1*b; Uk_1=Uk; Ek_1=Ek;
Código em C para compensador de corrente da tensão
double Ek; static double Ek_1=0; double Uk; static double Uk_1=0; double vIn; double Kcv; double Ts; double Wz; double a; double b; Kcv=0.01; Ts=0.000005; Wz=10000; a=(2*Kcv+Kcv*Wz*Ts)/2; b=(-2*Kcv+Kcv*Wz*Ts)/2; Ek= Vref-Vout; Uk=Uk_1+Ek*a+Ek_1*b; Uk_1=Uk; Ek_1=Ek;
Resultado obtido com controlador discretizado
O resultado obtido no modelo discretizado pode ser visualizado na Figura 18, tensão de saída com perturbação da fonte de tensão e saída do controlador. A única alteração em relação ao circuito contínuo é o controlador.

Considerações finais
O estudo dos conversores em sua forma ideal é primordial para entendê-lo plenamente. Com esse estudo é possível extrair as principais formas de onda e equações para dimensionamento. No entanto, existem aplicações em que esses modelos não são suficientes e são utilizados alguns que se assemelham mais de um conversor real, um exemplo seria um Buck que converte 5V para 1,8V.
Para os modelos utilizados foi verificado que a resistência Ron e RSE, diminuem o ganho do conversor, embora utilizado um valor muitas vezes considerado alto. Em aplicações que requerem alto desempenho pode ser que exista muita diferença da planta calculada com o conversor real, pois conforme visualizado, o controlador necessita um ciclo de trabalho maior no modelo com RSE e Ron. Além do que, essas variáveis fazem com que exista queda de tensão no circuíto.
O domino da frequência é uma ferramenta versátil para se dimensionar compensadores, é o possível verificar o ganho em baixas e altas frequências e também se existem várias frequências de corte.
A malha de corrente e muito importante para que o conversor opere com segurança e não ultrapasse a corrente máxima permitida. Claro que fusíveis podem ser postos, no entanto essa proteção faz com o conversor opere em modo de sobrecarga, baixando a tensão de saída e fornecendo a corrente máxima permitida. Avisos podem ser emitidos.
De modo geral as simulações atendem vários requisitos, no entanto ainda é necessário, ausência de carga , entre outros.
Referências
SLOA049B – Application note texas.
Franklin, Gene F. , Powell, J. David. Feedback Control of Dynamic Systems, 4th Edition . Prentice Hall; 4th edition (January 15, 2002).
Buso, Simone. Mattavelli, Paolo. Digital Control in Power Electronics.
Erickson, Robert W. , Maksimovic. Dragan. Fundamentals of Power Electronics 2nd ed.
BARBI, I. Projetos de fontes chaveavas. 2.ed.Florianopolis: Ed. Do Autor, 2007. 334.













Olá Carlos Eduardo,
Parabéns pelo artigo. Será que você poderia me sugerir um caminho, por favor?
Preciso fazer um conversor com tensão de entrada de 12Vca a 300Vca e na saída deve haver 12Vcc com 8A. Onde ele deve cortar a saída quando a tensão de entrada for inferior a 12Vca. Posso usar meia onda somente se necessário na entrada…
Muito obrigado!