Objetivo
O objetivo deste artigo é realizar uma comunicação wireless entre um setup controlado por uma STM32F0Discovery e um PC, o primeiro composto por um módulo Bluetooth HC-05 e o último por um HC-06.
Pré-requisitos
Para acompanhar este projeto, serão necessários:
- Conhecer o STM32CubeMX e o uVision 5;
- Entendimento de estrutura de dados e ponteiro de função em linguagem C.
Materiais
Materiais necessários:
- Um módulo Bluetooth HC-05 e um HC-06;
- O setup realizado no artigo anterior: STM32F0Discovery + LCD;
- Um conversor UART/USB;
- Cabos com conectores tipo fêmea.
Configurações de hardware
Como premissa, aproveitaremos o projeto do STM32CubeMX do artigo anterior para esta aplicação, assim abra o projeto citado e realize as seguintes configurações:

Os Melhores Treinamentos sobre Sistemas embarcados e IoT
Cursos com professores qualificados para acelerar sua carreira e projetos
- No periférico USART2, modifique o estado de Mode para Asynchronous. Feito isto, verá que os pinos PA2 (USART2_TX) e PA3 (USAT2_RX) ficarão em “verde escuro” (visualizando a figura do microcontrolador);
- Assim, gere os arquivos necessários para o uVision 5.
Conexões dos hardwares
Antes de mais nada, o PC nesta aplicação funcionará como um slave device, ou seja, receberá mensagens (strings) da Discovery, assim o hardware para o device será:
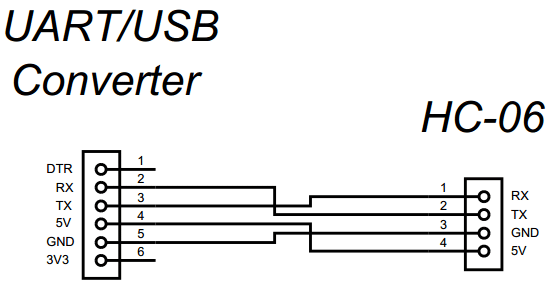
O esquema de conexão da Discovery é visto a seguir:

Código
Com o mesmo projeto (.uvprojx) do uVision 5 do artigo anterior, abra e realize a escrita do código a seguir:
/* Includes ------------------------------------------------------------------*/
#include "stm32f0xx_hal.h"
/* USER CODE BEGIN Includes */
#include "LCD.h"
#include "string.h"
#include "stdio.h"
/* USER CODE END Includes */
/* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef huart2;
/* USER CODE BEGIN PV */
/* Private variables ---------------------------------------------------------*/
#define NUM_FUNC_BT (unsigned char)4
#define INIT_CPLT_BT (unsigned char)7
#define RX_BUFFER_SIZE (unsigned char)10
#define _2s (unsigned int)2000
#define _4s (unsigned int)4000
enum
{
SendAt = 0,
SetConfOrgl ,
SetUART ,
SetName ,
SetPswd ,
SetRole ,
SetCmode ,
InitBluetooth
};
enum
{
SendCmdBt = 0,
WaitCpltBt,
NextBt ,
FinishBt
};
uint8_t CmdAt1[] = {"AT\r\n"};
uint8_t CmdAt2[] = {"AT+ORGL\r\n"};
uint8_t CmdAt3[] = {"AT+UART=38400,0,0\r\n"};
uint8_t CmdAt4[] = {"AT+NAME=BTMASTER\r\n"};
uint8_t CmdAt5[] = {"AT+PSWD=1234\r\n"};
uint8_t CmdAt6[] = {"AT+ROLE=1\r\n"};
uint8_t CmdAt7[] = {"AT+CMODE=1\r\n"};
uint8_t CmdAt8[] = {"AT+INIT\r\n"};
typedef void(*pFunc)(void);
pFunc pInitBt;
typedef struct
{
uint8_t *pData[8];
uint8_t LengData[8];
uint8_t State;
uint8_t Index;
uint32_t TimeOut;
pFunc pFuncBt[NUM_FUNC_BT];
}BT_TypeDef;
BT_TypeDef BtData;
uint8_t RxBuffer[RX_BUFFER_SIZE] = {0};
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART2_UART_Init(void);
/* USER CODE BEGIN PFP */
/* Private function prototypes -----------------------------------------------*/
void vSendCmdBt (void);
void vWaitCpltBt (void);
void vFinishBt (void);
void vNextCommandBt (void);
void vInitBlueTooth (BT_TypeDef* Bt);
/* USER CODE END PFP */
/* USER CODE BEGIN 0 */
void vSendCmdBt(void)
{
HAL_UART_Transmit(&huart2, BtData.pData[BtData.Index], BtData.LengData[BtData.Index], 10);
/* If the all command were sent and returning "OK", then FINISH the Bluetooth init.. */
if(BtData.Index >= INIT_CPLT_BT)
{
BtData.State = FinishBt;
pInitBt = BtData.pFuncBt[BtData.State];
}
else
{
/* Keep sendig AT commands */
BtData.State = WaitCpltBt;
pInitBt = BtData.pFuncBt[BtData.State];
}
}
void vWaitCpltBt(void)
{
BtData.TimeOut = HAL_GetTick();
HAL_UART_Receive(&huart2, RxBuffer, RX_BUFFER_SIZE, 10);
/* The return command is "OK", indicating that sent command was right */
if(RxBuffer[0] == 'O' && RxBuffer[1] == 'K')
{
BtData.TimeOut = 0;
BtData.State = NextBt;
pInitBt = BtData.pFuncBt[BtData.State];
}
else
{
/* Timeout procedure */
if(BtData.TimeOut >= _4s)
{
LCD_Clear();
LCD_GoTo(0,1);
LCD_SendText("BlueTooth Fail!");
LCD_GoTo(0,2);
LCD_SendText("Reset the board!");
for(;;){}
} /* Send another command to try stablish the comunication */
else if(BtData.TimeOut >= _2s)
{
BtData.State = SendCmdBt;
pInitBt = BtData.pFuncBt[BtData.State];
}
}
}
void vFinishBt(void)
{
return; /* Back to main */
}
void vNextCommandBt(void)
{
uint8_t i;
BtData.Index++;
/* Clean the Buffer */
for(i = 0; i < sizeof(RxBuffer) / sizeof(uint8_t); i++)
{
RxBuffer[i] = 0;
}
BtData.State = SendCmdBt;
pInitBt = BtData.pFuncBt[BtData.State];
}
void vInitBlueTooth(BT_TypeDef* Bt)
{
if(Bt != NULL)
{
/* Load the pointer vector with the AT comand adresses */
Bt->pData[SendAt] = CmdAt1;
Bt->pData[SetConfOrgl] = CmdAt2;
Bt->pData[SetUART] = CmdAt3;
Bt->pData[SetName] = CmdAt4;
Bt->pData[SetPswd] = CmdAt5;
Bt->pData[SetRole] = CmdAt6;
Bt->pData[SetCmode] = CmdAt7;
Bt->pData[InitBluetooth] = CmdAt8;
/* inform the size of the contents pointed */
Bt->LengData[SendAt] = (sizeof(CmdAt1)/sizeof(uint8_t)) - 1;
Bt->LengData[SetConfOrgl] = (sizeof(CmdAt2)/sizeof(uint8_t)) - 1;
Bt->LengData[SetUART] = (sizeof(CmdAt3)/sizeof(uint8_t)) - 1;
Bt->LengData[SetName] = (sizeof(CmdAt4)/sizeof(uint8_t)) - 1;
Bt->LengData[SetPswd] = (sizeof(CmdAt5)/sizeof(uint8_t)) - 1;
Bt->LengData[SetRole] = (sizeof(CmdAt6)/sizeof(uint8_t)) - 1;
Bt->LengData[SetCmode] = (sizeof(CmdAt7)/sizeof(uint8_t)) - 1;
Bt->LengData[InitBluetooth] = (sizeof(CmdAt8)/sizeof(uint8_t)) - 1;
/* Load the function pointer vector */
Bt->pFuncBt[SendCmdBt] = vSendCmdBt;
Bt->pFuncBt[WaitCpltBt] = vWaitCpltBt;
Bt->pFuncBt[NextBt ] = vNextCommandBt;
Bt->pFuncBt[FinishBt] = vFinishBt;
/* Load the first routine to run and set the state */
Bt->Index = 0;
Bt->TimeOut = 0;
Bt->State = SendCmdBt;
pInitBt = Bt->pFuncBt[Bt->State];
for(;;)
{
/* Function pointer of application */
(*pInitBt)();
if(pInitBt == vFinishBt)
{
break;
}
}
}
else
{
return;
}
}
/* USER CODE END 0 */
int main(void)
{
/* USER CODE BEGIN 1 */
uint8_t msg[] = {"EMBARCADOS!\r\n"};
/* USER CODE END 1 */
/* MCU Configuration----------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* Configure the system clock */
SystemClock_Config();
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
LCD_Init();
LCD_Clear();
LCD_GoTo(2,0);
LCD_SendText("STM32f0DISCO");
LCD_GoTo(8,1);
LCD_SendText("+");
LCD_GoTo(3,2);
LCD_SendText("Bluetooth");
LCD_GoTo(0,3);
LCD_SendText("Msg: EMBARCADOS!");
vInitBlueTooth(&BtData);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while(1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_GPIO_TogglePin(LD3_GPIO_Port, LD3_Pin);
HAL_GPIO_TogglePin(LD4_GPIO_Port, LD4_Pin);
HAL_UART_Transmit(&huart2, msg, (sizeof(msg) / sizeof(uint8_t) - 1), 10);
HAL_Delay(500);
}
/* USER CODE END 3 */
}
Como podemos ver, foi criada uma estrutura de dados com as variáveis relacionadas ao módulo Bluetooth, bem como um vetor de ponteiro que conterá os endereços dos comandos AT a serem enviados e também um vetor de ponteiro de função, o qual conterá os endereços das funções que farão a inicialização do dito hardware. Além disso, esta estrutura foi instanciada com BtData.
Na função vInitBlueTooth(BT_TypeDef* Bt) é feita a inicialização da estrutra (carrega as variáveis, vetores de ponteiro e função com os respectivos endereços) e também do módulo por meio de uma máquina de estados finitos (FSM). Dentro desta máquina, é enviado cada comando AT (vide os vetores CmdAt1 até CmdAt8), levando em consideração que para cada comando enviado deve-se receber um OK, confirmado que a configuração foi realizada com sucesso. Além disso, foi implementado um Timeout em que: se houver algum erro no envio de algum comando, o algoritmo envia novamente o comando em questão, porém se houver um segundo erro, haverá o timeout (indicando no display a falha).
A variável BtData.State funcionará como indexador do vetor de ponteiro de função, como também o indicador do estado da máquina para ajudar no processo de depuração.
A interação do módulo com a Discovery é feita serialmente utilizando as funções: HAL_UART_Receive() e HAL_UART_Transmit(), ambas possuem timeout de 10ms.
Finalizando todo o setup com a Discovery, escrita do código, compilada a aplicação sem erros e gravado o microcontrolador do kit, falta agora realizar a configuração do device (conexão realizada conforme esquema e conversor UART/USB conectado ao PC). A configuração deste pode ser realizada conforme o artigo do Wenderson Oliveira: Comunicação entre módulos Bluetooth HC-05 e HC-06, claro, considerando o HC-06, os mesmos parâmetros e, se preferir, o mesmo terminal que ele utilizou, ou seja, o RealTerm.
Realizada a configuração do device, o LED deste ficará piscando, indicando falta emparelhamento com outro dispositivo ou o mestre, assim como o LED do HC-05. Além disso, no display será vista a mensagem: “Bluetooh Fail! Reset the board!”. Não se preocupe, pois para iniciar corretamente e realizar o emparelhamento correto, deve-se segurar a tact switch deste módulo e pressionar o Reset da Discovery e depois soltando a tact switch. Logo, o emparelhamento será indicado pelo piscar dos dois LEDs (1Hz) do kit (vide main), a mensagem: “STM32F0DISCO + Bluetooth – Msg: EMBARCADOS!”, o LED do device aceso e o do HC-05 piscando a 2Hz com intervalos longos.
No terminal do PC, pode ser vista a seguinte imagem:

Funcionamento
O funcionamento da aplicação pode ser visto no vídeo a seguir: