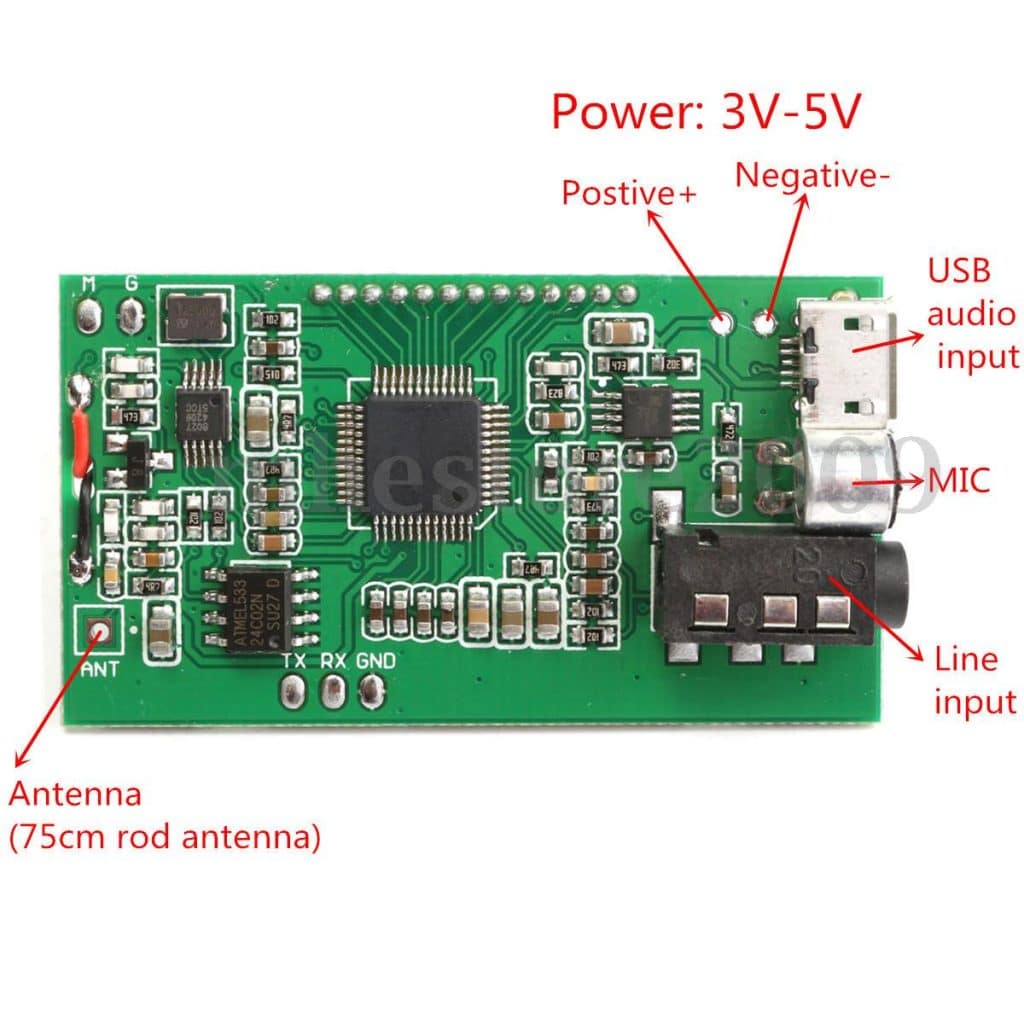
Nas minhas fuçadas pela internet, encontrei um módulo que me chamou a atenção, transmissor FM com entrada USB, microfone, P2, além de display LCD para sintonia de frequência, volume e interrupção na transmissão.
Esse módulo é facilmente comprado no ebay por menos de 6 dólares e é encontrado com a seguinte descrição: DSP PLL 87-108MHz Digital Wireless Microphone Stereo FM Transmitter Module Board.

Principais características
- Potência de saída: 100 mW
- Resposta em frequência do microfone: 50 Hz – 18 KHz
- Frequência de transmissão: 87,0 MHz – 108,0 MHz
- Modo modulação: padrão para rádio FM
- Canais: LINE / USB (estéreos), MIC (mono)
- Ruído equivalente: >30 dB (próximo à qualidade de CD)
- Tensão de alimentação: DC 3,0 V – 5,0 V
- Consumo de corrente: 35 mA
- Antena de transmissão: telescópica com 75 cm
- Distância de transmissão: até 100 metros com antena
- Tamanho: 26,5 x 49mm
Modos de funcionamento:
USB
Neste modo basta conectar um cabo USB com conector Micro USB Tipo B (igual de celular) ao módulo e a outra extremidade do cabo ao computador. Não precisa usar nenhuma fonte externa, o computador alimentará o módulo pelo cabo USB.
Como acontece com todo dispositivo USB conectado ao PC, ele será reconhecido e os drivers instalados (isso é automático).
Resultado após o reconhecimento:
Para testar é bem simples:
- Ligue seu aparelho de som e procure por uma frequência sem nenhuma estação.
- Ajuste a mesma frequência no módulo pressionando as chaves FRE- e FRE+.
- Abra seu player favorito no computador e selecione a saída de áudio como demonstrado na figura a seguir.
- Por último, reproduza alguma música.
O mesmo vale para uso do microfone de PC.
LINE
O modo LINE é semelhante ao anterior, porém você precisa de um cabo P2-P2 para ligar seu PC/celular ao módulo. Neste caso, é necessário o uso de uma fonte de alimentação externa com tensão entre 3 e 5 volts.
A figura abaixo monstra bem todas a ligações:
Microfone
Neste modo basta alimentar o módulo com uma fonte externa (não usar a entrada USB) e pronto, o áudio capturado pelo microfone já será transmitido em FM na frequência selecionada.
Aplicações
Os modos USB e LINE podem ser utilizados para transmitir suas playlists diretamente para um aparelho de som mais potente e organizar sua festa ou evento.
O modo Microfone pode ser utilizado para criar uma baba eletrônica de baixíssimo custo. Coloque o módulo alimentado por uma pequena fonte no quarto do bebe e sintonize seu rádio relógio (por exemplo) na frequência do módulo, sempre que o bebe chorar você vai escutar.
Outra aplicação legal usando o modo Microfone é a criação de um karaokê caseiro.
Demonstração
Preparei um vídeo com a demonstração de seu funcionamento, que está disponível no YouTube.
Conclusões e considerações
Apesar desse módulo ser muito interessante, ele deve ser utilizado apenas para protótipos ou hobby. Lembre-se, no Brasil qualquer equipamento comercial que utilize rádio frequência é preciso passar por homologação da Anatel ($$$).
Existem muitos outros módulos semelhantes a esse na internet a preços bem convidativos, mas acho que esse é um dos mais legais.
Tome cuidado ao utilizar rádio frequência, lembre-se, você está transmitindo informações que podem ser recebidas por qualquer rádio FM no raio de alcance do seu transmissor.
Link utilizado para compra do módulo.