
Nos artigos do Denis Shimizu, foi explicado como instalar e fazer um projeto para o microcontrolador da família K64F utilizando a IDE + Compilador (KDS), com suporte às bibliotecas de abstração de hardware (KSDK) e inicialização dos periféricos com a ferramenta Processor Expert (PE).
Nesta sequência de artigos, apresentarei algumas maneiras de criar o código, usando a FRDM-K64F e KDS, para que você leitor possa decidir o que acha mais vantajoso:
- Codificação sem suporte ao KSDK e ao Processor Expert;
- Codificação com suporte ao KSDK e sem suporte ao Processor Expert;
- Codificação com suporte ao KSDK e ao Processor Expert.
Preparação do ambiente
Sugiro que acesse o post do Denis Shimizu aqui, onde é descrito o procedimento de preparação do ambiente.
Preparação da placa
A placa FRDM-K64F já vem com um firmware que permite a gravação do microcontrolador. Para estes post, farei uso do firmware da empresa Pemicro, pois funcionou muito bem nos meus testes. Siga os seguintes passos:

Os Melhores Treinamentos sobre Sistemas embarcados e IoT
Cursos com professores qualificados para acelerar sua carreira e projetos
1) Acessar o site da Pemicro: www.pemicro.com;
2) Clicar na aba de “Support”;
3) Cliclar no link “Documentation & Downloads”;
4) Na coluna “Popular Downloads”, procure por “OpenSDA Firmware Applications”;
5) É necessário um cadastro, ou o fornecimento de uma conta de email para conseguir baixar os arquivos;
6) Você receberá um email da Pemicro contendo o link para download;
7) O formato do arquivo será este:
Pemicro_OpenSDA_Debug_MSD_Update_Apps_AAAA_MM_DD.zip
Onde:
- AAAA = ano
- MM = mês
- DD = dia
8) Descompacte-o e procure pelo seguinte arquivo:
DEBUG-FRDM-K64F_Pemicro_v108a_for_OpenSDA_v2.0.bin
9) Este deve ser copiado para a placa;
10) Com a placa desconectada, pressione e mantenha pressionado o botão de RESET;
11) Conecte o cabo USB na porta “SDAUSB”;
12) Aparecerá uma janela com a indicação de “BOOTLOADER”. Copiar o arquivo para esta pasta;
13) A janela se fechará sozinha e o LED D2 começará a piscar rapidamente;
14) Desconecte e conecte o cabo USB, mas desta vez não precisa pressionar o botão de RESET;
15) Verifique se o driver já foi instalado corretamente, acessando o gerenciador de dispositivos na categoria “Portas (COM e LPT)”.

Documentos necessários
- Datasheet da família de microncotroladores K64F: K64P144M120SF5.pdf
- Reference Manual da família de microcontroladores K64F: K64P144M120SF5RM.pdf
- Esquema eletrônico da placa Freedom FRDM-K64F: FRDM-K64F_SCH.pdf
Projeto base para comparação dos métodos:
O projeto base piscará as três partes do led RGB. Olhando o esquemático (FRDM-K64F_SCH.pdf) na página 2, podemos identificar em que pinos do microcontrolador estão ligados cada pino do led RGB.
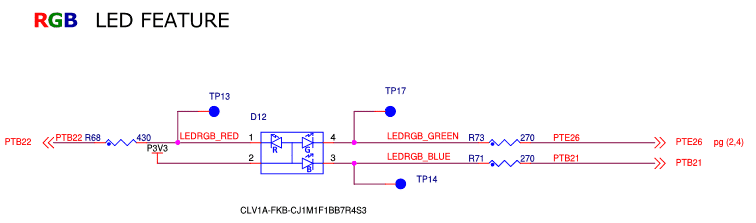
- LED Vermelho: PTB22
- LED Verde: PTE26
- LED Azul: PTB21
- Para acender um led, é necessário aplicar nível lógico “0”
- Para apagar um led, é necessário aplicar nível lógico “1”
Procedimento de criação do projeto
Com o KDS aberto, siga o caminho: “File -> New -> Kinetis Project”.

No campo “Project Name”, digite o nome de projeto “PiscaLedSemSuportes”.
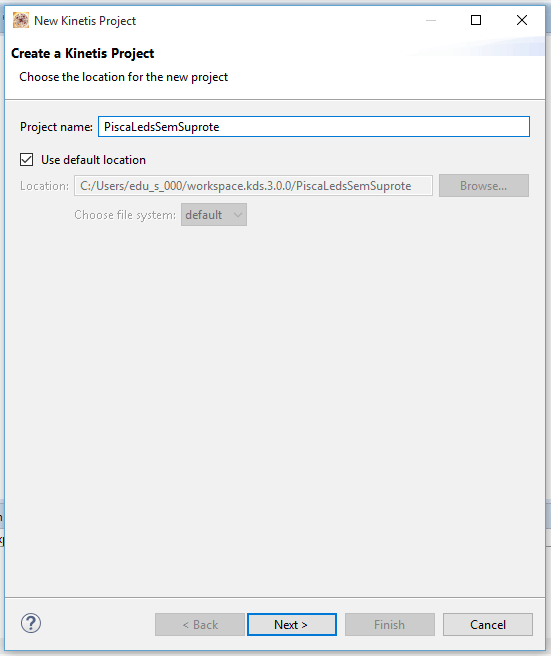
Clicar em “Next”. Selecione “Processors -> Kinetis k -> MK60 -> MK64F (120MHz) -> MK64FN1M0xxx12”.
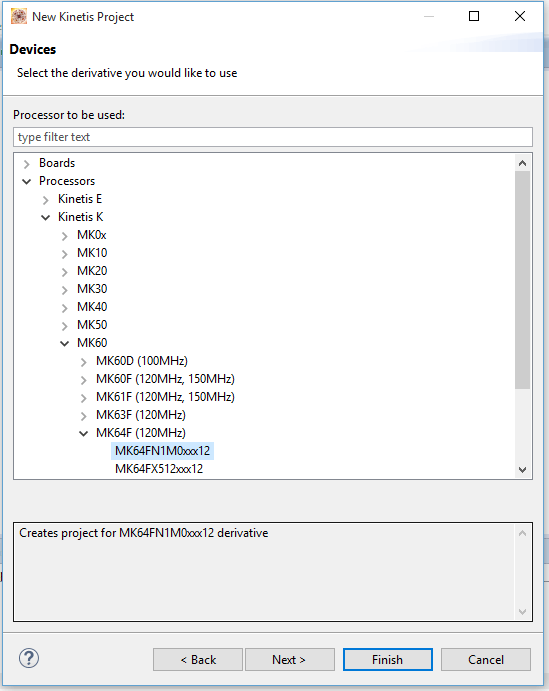
Clicar em “Next”. No combo box do “Kinetis SDK”, selecione “None”. Deixe o checkbox do “Processor Expert” desabilitado.
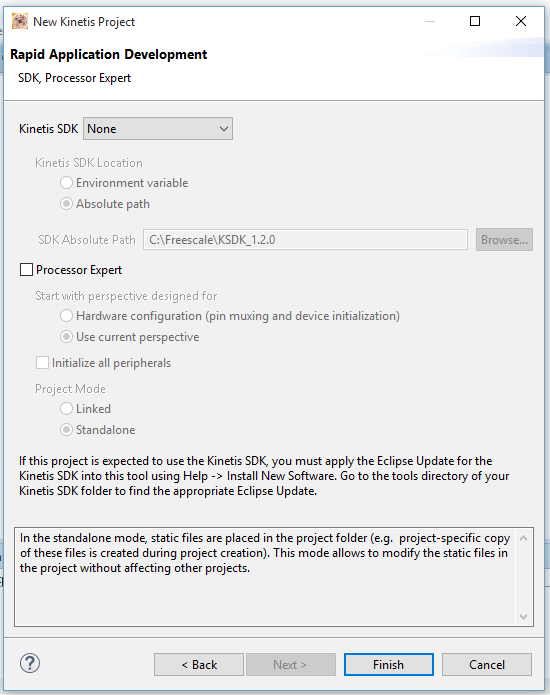
Clicar em “Finish”. Um novo projeto aparecerá no campo Project Explorer.
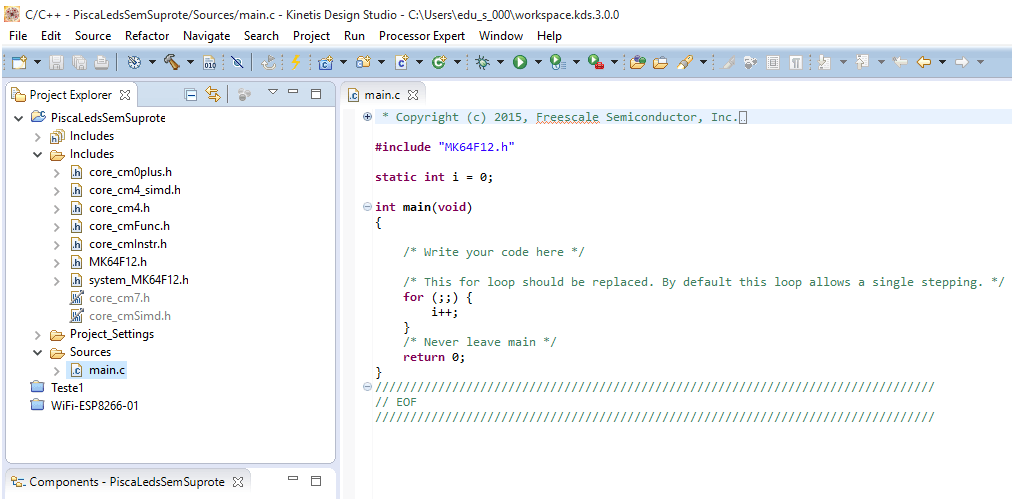
Este projeto tem o mínimo de código necessário para o desenvolvimento do software para o microcontrolador selecionado:
- Arquivo “main.c” com a função “int main(void)”;
- Arquivo “MK64F12.h” onde tem as estruturas e endereçamento para acessar os registradores do microcontrolador em questão.
O firmware terá as seguintes tarefas:
- Habilitar o fornecimento de clock para os ports;
- Configurar os pinos para operar como GPIO;
- Configurar a direção dos pinos;
- Operar no acionamento dos pinos.
1 – Habilitar o fornecimento de clock para os ports
No arquivo “K64P144M120SF5RM.pdf” (Reference Manual), capítulo 12, é explicado o Módulo de Integração de Sistema (SIM – System Integration Module). Na página 314, tem o descritivo do registrador SCGC5. Os bits 9, 10, 11, 12 e 13 são responsáveis por habilitar o clock dos ports.

Neste projeto serão utilizados dois ports, B e E, então, é necessário habilitar os clocks destes ports:
- Bit 13 -> PORTE
- Bit 10 -> PORTB
Trecho de código:
SIM->SCGC5 |= 1<<10 | 1<<13;
2 – Configurar os pinos para operar como GPIO
No Reference Manual, capítulo 11, é explicado o registrador que configura as funções dos pinos, PCR (Pin Control Register). Cada pino tem o seu registrador.
Na página 282, seção 11.5.1, tem o descritivo do registrador PORTx_PCRn.

Os bits importantes para este projeto são:
- Bits 10-8 -> MUX: configura a função do pino, 001 – GPIO
- Bit 6 -> DSE: Drive Strenght Enable, 1 – High Drive
- Bit 5 -> ODE: Circuito de Open Drain, 0 – desabilitado
- Bit 4 -> PFE: Circuito de filtro de entrada, 0 – desabilitado
- Bit 2 -> SRE: Configuração de Slew Rate, 1 – Slow
- Bit 1 -> PE: Circuito de Pull, 0 – desabilitado
- Bit 0 -> PS: Circuito de Pull down ou Pull up, 0 – pulldown
Trecho de código:
PORTB->PCR[22] |= 1<<8 | 1<<6 | 1<<2; PORTB->PCR[22] &= ~(1<<5) & ~(1<<4) & ~(1<<1) & ~(1<<0); PORTE->PCR[26] |= 1<<8 | 1<<6 | 1<<2; PORTE->PCR[26] &= ~(1<<5) & ~(1<<4) & ~(1<<1) & ~(1<<0); PORTB->PCR[21] |= 1<<8 | 1<<6 | 1<<2; PORTB->PCR[21] &= ~(1<<5) & ~(1<<4) & ~(1<<1) & ~(1<<0);
3 – Configurar direção dos pinos
No Reference Manual, capítulo 55, é explicado o bloco de GPIO. Os registradores importantes são:
- GPIOx_PDDR: Direção
- GPIOx_PSOR: Seta bit
- GPIOx_PCOR: Clear bit
- GPIOx_PTOR: Toggle bit
Nesses registradores, cada bit se refere a um pino do microcontrolador. No registrador de direção (GPIOx_PDDR), se escrever “1” o pino é configurado como saída, se escrever “0” o pino é configurado como entrada.
Registrador de “Seta bit” (GPIOx_PSOR), escrevendo 1 no bit, a saída vai para nível lógico 1. Registrador de “Toggle bit” (GPIOx_PTOR), escrevendo 1 no bit, a saída alterna o nível lógico.
Trecho de código:
//Configura direção dos pinos GPIOB_PDDR |= 1<<22 | 1<<21; GPIOE_PDDR |= 1<<26; //Condição inicial dos pinos para apagar os leds GPIOB_PSOR |= 1<<22 | 1<<21; GPIOE_PSOR |= 1<<26;
A funcionalidade de delay será feita com o decremento de uma variável com um grande valor.
Trecho de código:
uint32_t var_delay = 5000000;
//Loop infinito
while(1)
{
//Toggle dos leds
GPIOB_PTOR = 1<<22 | 1<<21;
GPIOE_PTOR = 1<<26;
//Decremento de variável para controlar do delay
while(--var_delay > 0);
var_delay = 5000000;
}
Este programa não teve nenhuma abstração de hardware, ou seja, os registradores do microcontrolador foram acessados diretamente. Não tem módulos para tratamento dos GPIOs.
Para saber o tamanho do código gerado, é necessário habilitar a funcionalidade. Clique com o botão direito sobre o nome do projeto. Selecione a opção “Properties”.

Siga o seguinte caminho: “C/C++ Build -> Settings -> Toolchains”. Marcar o checkbox “Print size”.
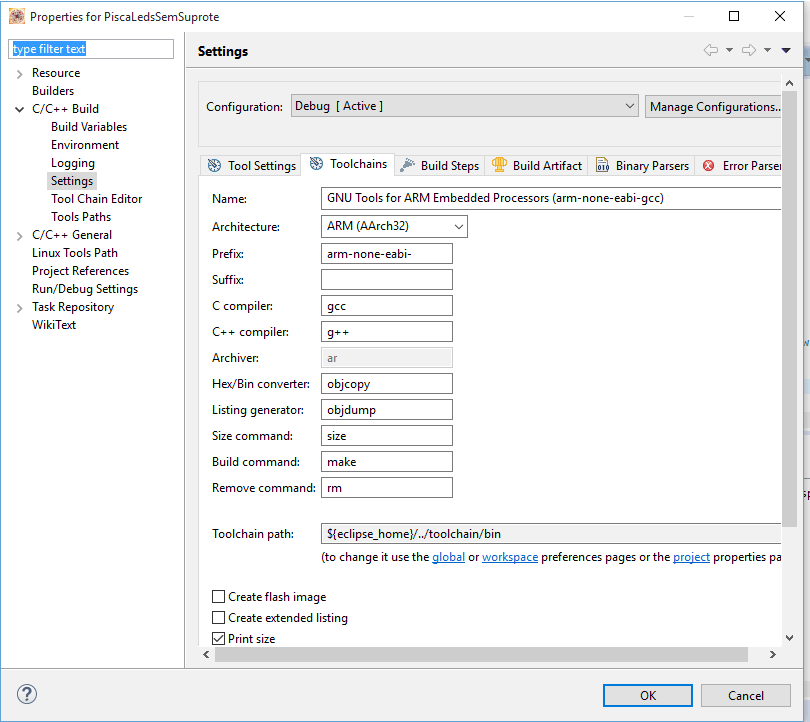
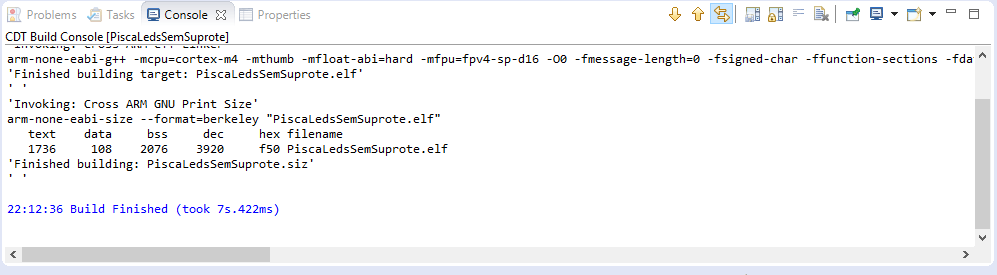
Clicar no botão “Apply” e depois em “OK”. Compilar o projeto clicando no botão “Build”.

No console aparecerá o tamanho do binário gerado.
Para gravar e depurar o código, conectar a placa ao PC através do cabo USB. Sendo que deve usar a conexão USB nomeado como “SDA”. Cliclar na seta ao lado do botão de debug.

Selecionar a opção “Debug Configurations” > “GDB PEMicro Interface Debugging” > “PiscaLedSemSuportes_Debug_PNE”. Selecionar a aba “Debugger”.
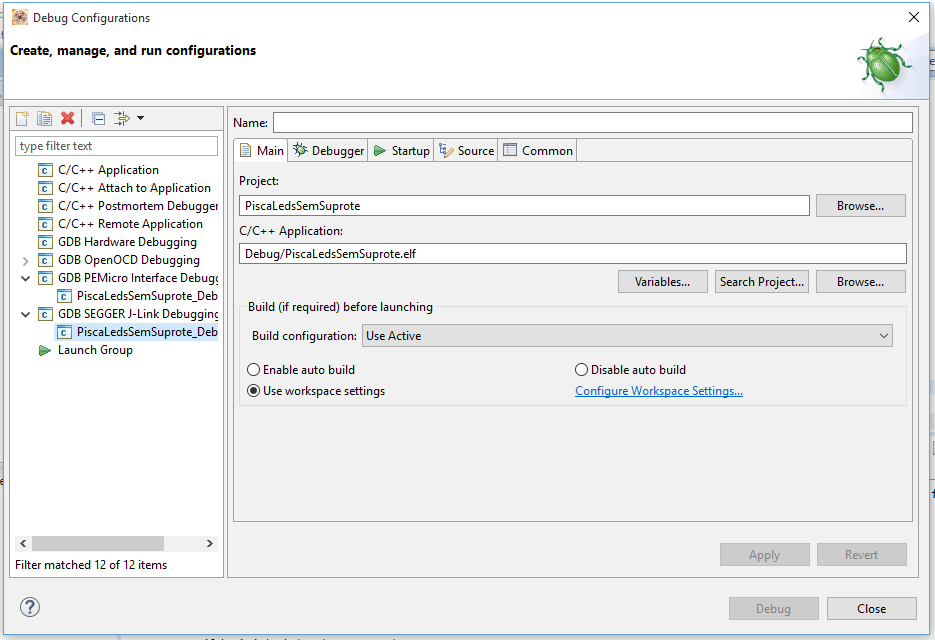
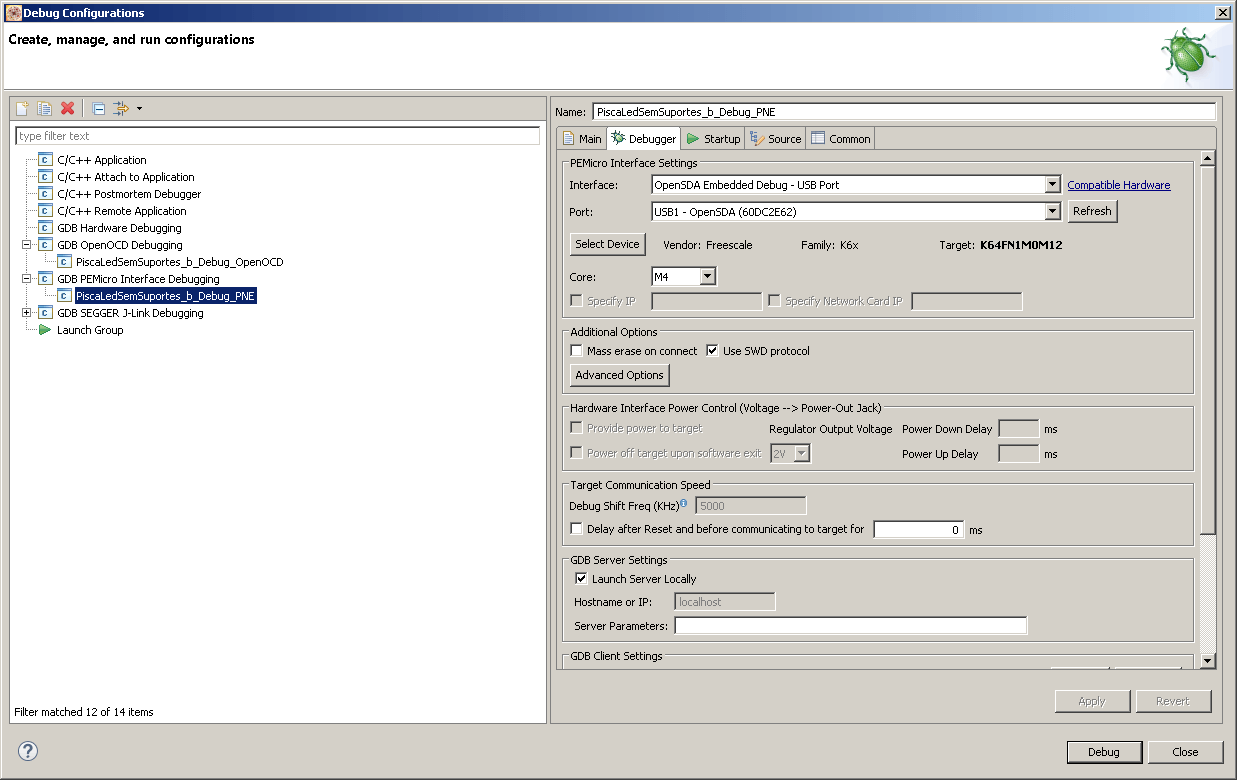
No campo “Interface”, selecionar a oção “OpenSDA Embedded Debug – USB Port”. Verifique se no campo “Port”, o dispositivo foi identificado, no meu caso apareceu “USB1 – OpenSDA (60DC2E62)”. Clicar no botão “Debug”. O KDS iniciará o processo de gravação do microcontrolador e preparação da IDE para permitir a execução e depuração do programa.
Clicar no botão “Play” para executar o programa e ver os três leds piscarem juntos (o efeito é de um led branco).
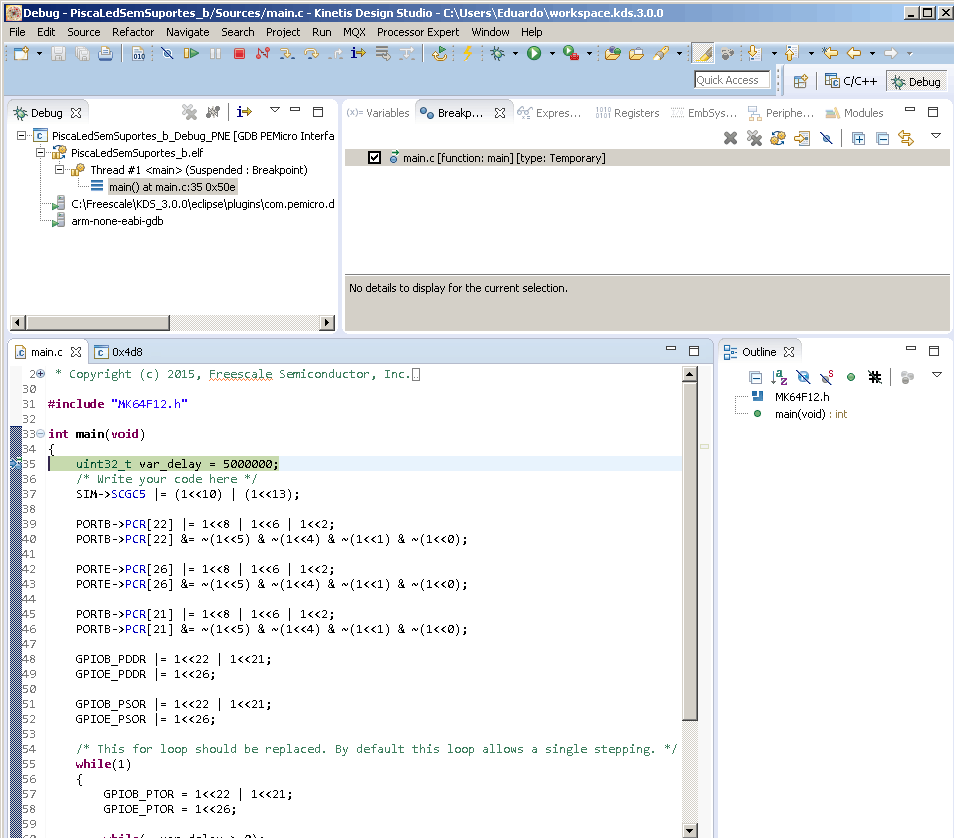
Este é o código completo:
int main (void)
{
uint32_t var_delay = 5000000;
//Habilitando o clock para os Ports B e E
SIM->SCGC5 |= (1<<10) | (1<<13);
//Configuração do registrador Pin Control
//Pino que controla o Led Vermelho
PORTB->PCR[22] |= 1<<8 | 1<<6 | 1<<2;
PORTB->PCR[22] &= ~(1<<5) & ~(1<<4) & ~(1<<1) & ~(1<<0);
//Pino que controla o Led Verde
PORTE->PCR[26] |= 1<<8 | 1<<6 | 1<<2;
PORTE->PCR[26] &= ~(1<<5) & ~(1<<4) & ~(1<<1) & ~(1<<0);
//Pino que controla o Led Azul
PORTB->PCR[21] |= 1<<8 | 1<<6 | 1<<2;
PORTB->PCR[21] &= ~(1<<5) & ~(1<<4) & ~(1<<1) & ~(1<<0);
//Loop infinto para controlar o toggle dos leds
while(1)
{
//Toggle dos leds
GPIOB_PTOR = 1<<22 | 1<<21;
GPIOE_PTOR = 1<<26;
//Decremento de variável para controlar do delay
while(--var_delay > 0);
var_delay = 5000000;
}
}
Conclusão
Foi necessário procurar todos os nomes de registradores, para que todos os blocos do microcontrolador fossem habilitados para operar. Sendo que a velocidade do clock foi mantida a padrão, se não, teriam mais registradores para serem acessados.
Nos próximos posts as configurações ficarão mais fáceis. E o tamanho do binário… Bem, espere o próximo post para mais detalhes.
O que achou, difícil, fácil, já fez isso com outros microcontroladores, com núcleos diferentes?
















Muito interessante a série, Eduardo Scherrer. Trabalho a um tempo com kds e K64F, mas tenho dificuldades para encontrar documentações referentes a configuração I2C. Teria alguma dica ou documentações que possa ajudar?
Olá André.
Obrigado pelo interesse no assunto.
Com relação à documentação, você pode olhar nos seguintes tipos de documento, Reference Manual, Program Manual e Datasheet. Isto se aplica até aos outros fabricantes
Aqui é a página da família K64
https://www.nxp.com/products/processors-and-microcontrollers/arm-based-processors-and-mcus/kinetis-cortex-m-mcus/k-seriesperformancem4/k6x-ethernet/kinetis-k64-120-mhz-256kb-sram-microcontrollers-mcus-based-on-arm-cortex-m4-core:K64_120
E este link é para a documentação (neste você encontrará o Reference Manual).
https://www.nxp.com/products/processors-and-microcontrollers/arm-based-processors-and-mcus/kinetis-cortex-m-mcus/k-seriesperformancem4/k6x-ethernet/kinetis-k64-120-mhz-256kb-sram-microcontrollers-mcus-based-on-arm-cortex-m4-core:K64_120?tab=Documentation_Tab
O capitulo 51 e referente a I2C.
Abraço.
Oi Eduardo, muito bacana o post!
Tenho uma FRDM-K64F também e já brinquei um pouquinho com ela . É muito bom que ela possui LED RGB, dá pra fazer vários debugs divertidos.
Eu tenho um projeto baśico para aprendizado utilizando Makefile e o compilador GNU-GCC para a FRDM-K64F. Minha idéia não era usar o KDS e sim meu Makefile. Segue o respositório:
https://github.com/ferlzc/FRDM-K64F-baremetal-minimal
Espero seu próximo post sobre a análise do tamanho do binário.
Um grande abraços!
Fernando
Que bom que gostou Fernando.
A ideia desta sequência de posts é dar um ponto pé inicial, e colocar o pessoal pra colocar um micro tão pontente pra rodar de forma mais amigável possível.
Mostrar algumas maneiras de fazer projetos com o KDS e assim concluirem o que compensa mais para cada caso. Lembrando que este micro tem 1MB de flash.
Obrigado pela referência do seu repositório, muito bom hein.
Os próximos post serão legais, e espero que continue gostando e aproveitando.
Um abraço
Eduardo Scherrer