
Nos artigos anteriores apresentamos a placa Freedom KL05z, como fazer sua configuração inicial, realizar acionamentos de saídas digitais e criar uma biblioteca para simplificar esses acionamentos.
Como o objetivo nesta série é apresentar o processo de desenvolvimento de um sistema embarcado, foram escolhidos periféricos mais gerais, comuns à grande maioria dos projetos, como modo de apresentar melhor os conceitos necessários para o projeto. São eles: leds, displays de 7 segmentos, LCD, Buzzer (acionado com PWM), teclas, potenciômetro, LDR (sensor de luminosidade), LM35 (sensor de temperatura) e um DS1307 (relógio de tempo real com comunicação I2C). Com esse conjunto é possível apresentar os principais modos de funcionamento, acionamento de saídas ou leitura de informações que um desenvolvedor possa encontrar.
Um primeiro problema com essa abordagem, em conjunto da placa Freedom KL05z, é a falta de terminais suficientes para acionar todos os periféricos desejados. Para contornar esse problema é comum que os desenvolvedores procurem chips de expansão de I/O`s. No nosso caso vamos trabalhar com o 74hc595, que é um registrador de deslocamento (Shift Registers), ou seja, um conversor serial-paralelo. Com ele é possível controlar até 8 saídas de uma só vez com apenas 3 terminais. Para isso vamos focar no artigo de hoje em como este circuito funciona e como desenvolver um código que possa realizar a interface entre o microcontrolador e o expansor de saídas 74hc595.
Antes de entendermos o funcionamento do 74hc595, temos que entender o funcionamento de um FLIP-FLOP tipo D e de um deslocador de registro.

Os Melhores Treinamentos sobre Sistemas embarcados e IoT
Cursos com professores qualificados para acelerar sua carreira e projetos
FLIP-FLOP D
Os FLIP-FLOPs são dispositivos básicos de memorização, ou seja, são basicamente memórias primitivas.
A seguir é apresentada a representação de um flip flop D genérico:

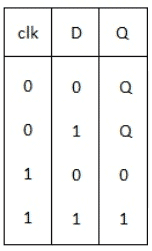
(D – dado, R – Reset, CLK- Clock, Q – Saída)
O seu funcionamento pode ser explicado do seguinte modo:
- Quando o CLK estiver em nível alto, a entrada D é reproduzida na saída Q;
- Quando o CLK estiver em nível baixo, a saída Q permanece com o nível anterior;
- Para resetar o valor de Q é necessário ter nível alto no R e CLK.
Se montarmos a tabela verdade desse dispositivo temos algo como:
Deslocador de registro
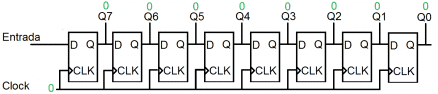
Os deslocadores de registro ou shift registers possuem diversos Flip Flops D em série, que permitem a conversão do dado enviado em forma serial para a forma paralela. A conversão se realiza por deslocamentos consecutivos.
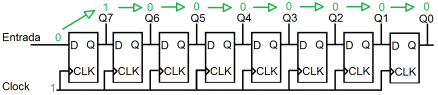
Supondo uma série de Flip Flops D genéricos e que nossa entrada (dados) seja de 8 bits. Como início temos que as saídas Q7~Q0 estão flutuando, por conveniência, vamos supor que Q7~Q0 sejam 0. Logo temos:
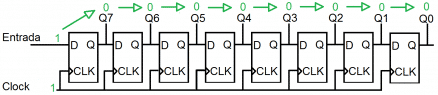
Para que Q7 passe a ter o valor de D, é necessário que ocorra um pulso clock, porém como todos estão em série, ao dar o clock, ocorre uma reação em cadeia, ou seja, Q6 passa ter o valor de Q7, Q5 o de Q6 e assim por diante.
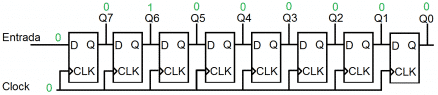
Para facilitar o entendimento, faremos um exemplo com uma entrada 10010101. Quando é enviado o Bit 1 e o clock passa a ser 1, o circuito se comporta da seguinte maneira:
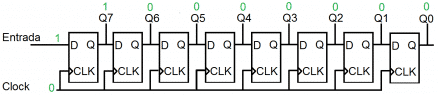
Quando o sinal do clock volta ser 0 , ou seja, quando o pulso de clock é finalizado, ocorre o descolamento das saídas:
O mesmo ocorre quando o Bit 0 é enviado e o clock passa a ser 1:
Quando o pulso é finalizado, temos:
Para o valor de informação desejado, 10010101, o estado do registrador, após enviarmos todos os bits, é dado por:
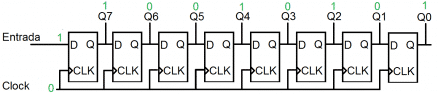
Pode se observar que a os bits foram recebidos de modo serial e estão agora apresentados de modo paralelo, completando a conversão.
No 74HC595, para não se perder os dados antigos, quando novos dados estão sendo convertidos, as saídas dos flip flops são conectas a outros Flip Flops, o que permite a memorização dos dados na saída.
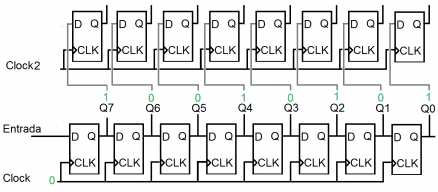
Para gravar os dados e permitir que saída seja os dados de entrada, basta dar um pulso de clock (Clock2) na primeira fileira.
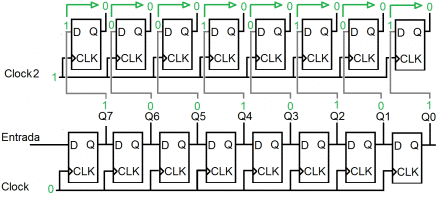
Quando o pulso é finalizamos vamos ter:
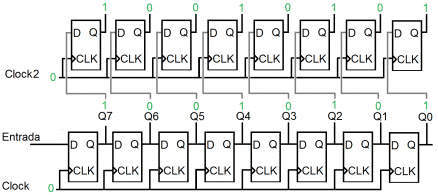
Quando novos dados chegam, a conversão ocorre na segunda fileira, porém como clock2 permanece 0, a saída se manterá a mesma. Quando a conversão é finalizada e se deseja jogar os dados da conversão para a saída, bastar dar um pulso de clock em clock2.
O 74HC595
O 74hc595 funciona de modo muito parecido com o apresentado até agora. Ele possui apenas algumas alterações, visando ampliar um pouco os recursos disponíveis. A seguir é apresentado o esquemático fornecido pela ST em seu datasheet.
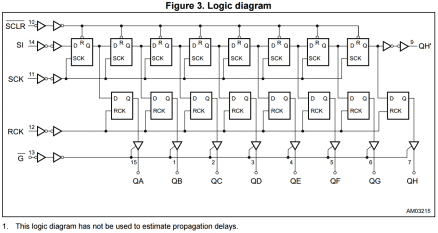
Entre as diferenças do circuito da ST e do apresentado até agora, podemos perceber um sinal (G) que desconecta ou conecta a saída em modo tristate, possibilitando que o desenvolvedor coloque o 74hc595 em paralelo com outros dispositivos de saída num mesmo barramento, sob condições pré definidas, sem que haja curto circuito.
Para economizarmos os pinos da placa, e simplificar a utilização do shift register, vamos sempre deixar o sinal (G) em 1 e o reset no 0, já que as chaves possuem lógica invertida.
As entradas SI, SRK e SCK não necessitam de pinos especiais, ou seja, pode se escolher em qual terminal de IO se deseja por essas entradas.
Abaixo segue a imagem e footprint dos terminais do 74hc595.
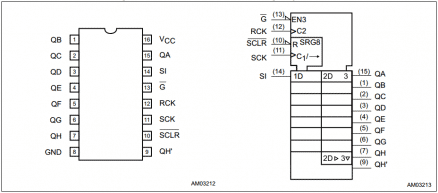
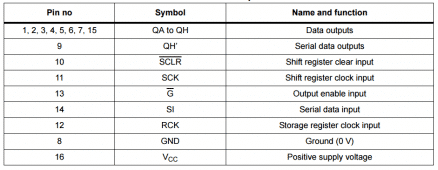
Com estas referências podemos montar o seguinte circuito:
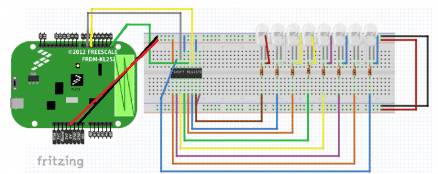
Foi utilizado o software Fritzing para fazer a representação gráfica da ligação. Por escolha própria a entrada de dados (Si) foi colocada no pino 6, o RCK no pino 0 e o SCK no pino 5. Mas vale relembrar que eles podem ser conectados em qualquer pino.
Após realizarmos as conexões de hardware podemos começar a criação da biblioteca responsável pelo controle do CI.
É necessário realizar o controle apenas dos sinais Si, SCK e RCK. Como explicado, na biblioteca responsável por esse chip, deve possuir as seguintes funcionalidades:
- Configurar os pinos Si, SRC e RCK como output;
- Enviar um bit;
- Dar pulso de clock em SCK para cada bit enviado e;
- Após enviar os 8 bits, dar um pulso de clock em RCK.
Para simplificar o desenvolvimento dessa biblioteca vamos utilizar a biblioteca GPIO, desenvolvida no artigo passado. Assim o código da biblioteca responsável pela inicialização e envio de dados do 74hc595 pode ser dada por:
#include "io.h"
#define SCK 5
#define Si 6
#define RCK 0
void soInit(void) {
pinMode(RCK, OUTPUT);
pinMode(clockpin, OUTPUT);
pinMode(datapin, OUTPUT);
}
void shift_out(int value) {
int x;
digitalWrite(clockpin, LOW);
digitalWrite(RCK , LOW);
for (x = 0; x < 8; x++) {
if (value & 0x80) {
digitalWrite(Si, HIGH);
} else {
digitalWrite(Si, LOW);
}
digitalWrite(SCK, HIGH);
digitalWrite(SCK, LOW);
value = (value << 1);
}
digitalWrite(RCK , HIGH);
digitalWrite(RCK , LOW);
}
#ifndef SO_H_
#define SO_H_
void soInit (void);
void shift_out(int value);
#endif /* SO_H_ */
É importante lembrar que o envio dos bits podem ser realizado do mais para o menos significativo ou do menos para o mais significativo, isso vai depender de como o hardware foi ligado.
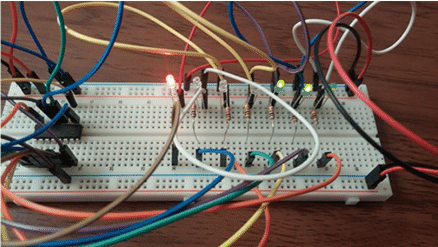
Abaixo segue um exemplo de como realizar o acionamento de 7 leds com apenas 3 terminais de saída utilizando o 74hc595:
















Rodrigo, parabéns pelo artigo !
Muito bem explicado, vou comprar a placa pra me desenvolver mais em arm M0. Valeu
De nada Alessandro,
Precisando de algo estamos a disposição!