
Olá caro leitor, neste quarto artigo da série Biblioteca de software para a FRDM-KL25Z. Será apresentada a biblioteca de software para o barramento de comunicação I²C (Inter-Integrated Circuit) e exemplo de aplicação utilizando o módulo Tiny RTC I2C.
As bibliotecas aqui apresentadas são compatíveis com o Kinetis Design Studio IDE e CodeWarrior IDE. Também são facilmente portáveis para as demais Freedom Board.
O microcontrolador presente na Freedom Board KL25Z, o MKL25Z128VLK4, contém dois módulos de comunicação I²C (I2C0 e I2C1), que trabalham com dados de 8 bits. Os módulos permitem trabalhar tanto no modo mestre (Master) ou no modo escravo (Slave). O módulo de comunicação I²C deste microcontrolador possui também interface DMA (Direct Memory Access).
A seguir serão apresentadas as configurações mínimas para trabalhar com o I²C na Freedom Board KL25Z no modo mestre. Apresentando funções de inicialização do periférico e funções de escrita e leitura, e por fim, um exemplo de aplicação de utilização da comunicação I²C.

Os Melhores Treinamentos sobre Sistemas embarcados e IoT
Cursos com professores qualificados para acelerar sua carreira e projetos
Introdução I²C
O I²C, IIC ou I2C (Inter-Integrated Circuit – Circuito Inter-integrado) é barramento de comunicação serial síncrono Mestre/Escravo, desenvolvido pela empresa Philips Semiconductor (hoje NXP Semiconductors). Algumas empresas utilizam outra nomenclatura: TWI (Two Wire Interface – Interface de Dois Fios) ou 2-Wire Serial, TWSI (Two-Wire Serial Interface – Interface Serial de Dois Fios).
A comunicação I²C possui duas linhas de sinais SDA (Serial Data) e SCL (Serial Clock Line), sendo um sinal para transmissão de dados e outro o sinal de Clock. O SDA é um sinal bidirecional, permitindo a troca de dados entre o mestre e os escravo de maneira não simultânea (Half-Duples). O SCL é sinal de Clock paro sincronismo da comunicação, este sinal é gerado pelo mestre.

Outra característica muito importante a ser mencionada sobre a comunicação I2C é o fato que suas duas linhas de sinais utiliza Dreno Aberto (Coletor Aberto), significa que o transistor é para chavear o sinal para 0 (0 Volts – GND). Para chavear o sinal para 1 (3,3 ou 5 Volts – VCC) se faz necessário utilizar resistores de pull-up em suas linhas. Tipicamente são utilizados resistores com valores entre 2K2 a 4K7 Ohms.
A comunicação I²C pode endereçar até 127 dispositivos, porque faz o uso de 7 Bits de endereçamento (existem alguns dispositivos com endereçamento de 10 Bits, permitindo o endereçamento de até 1023 dispositivos). Para mais informações a respeito da comunicação I²C, recomendo a série de artigos escrita pelo o Francesco Sacco “Módulo Tiny RTC I2C”, onde é explicado com maior detalhes.

Inicializando I²C
Configuração da fonte de Clock
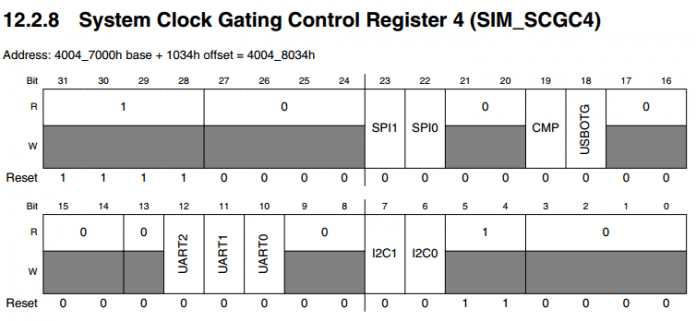
O primeiro item a ser configurado para o funcionamento da comunicação I²C é a fonte de Clock. Para realizar esta tarefa deve utilizar o registrador System Clock Gating Control Register 4 (SIM_SCGC4).
Para escrever no registrador deve utilizar as macros SIM_SCGC4_I2C0_MASK para o I2C0 e SIM_SCGC4_I2C1_MASK para I2C1.
As figuras abaixo ilustram os parâmetros do registrador.

Configuração dos pinos do barramento de comunicação I²C
O segundo item a ser configurado é os pinos para a comunicação I²C. Cada periférico de comunicação I²C possui quatro alternativas de pinos. A seguir é apresentada a tabelas com os pinos.
|
I2C0 | ||||
|
Pinos I²C |
Alternativa 0 |
Alternativa 1 |
Alternativa 2 |
Alternativa 3 |
|
SCL |
PTE24 |
PTB0 |
PTB2 |
PTC8 |
|
SDA |
PTE25 |
PTB1 |
PTB3 |
PTC9 |
|
I2C1 | ||||
|
Pinos I²C |
Alternativa 0 |
Alternativa 1 |
Alternativa 2 |
Alternativa 3 |
|
SCL |
PTE0 |
PTA3 |
PTC1 |
PTC10 |
|
SDA |
PTE1 |
PTA4 |
PTC2 |
PTC11 |
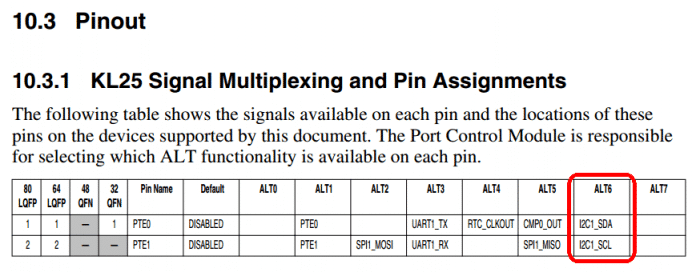
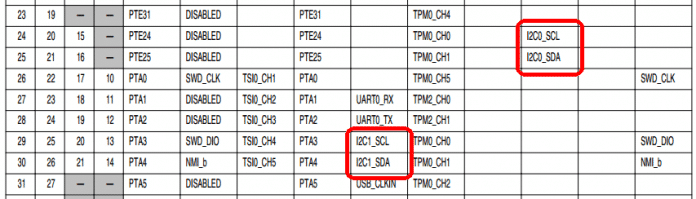
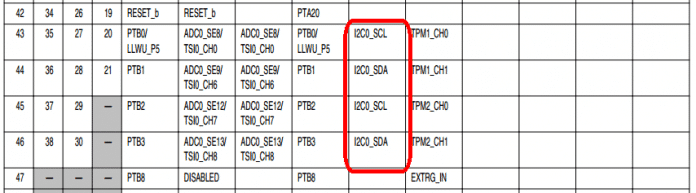
Para definir as funcionalidades dos pinos devemos seguir as instruções do Signal Multiplexing and Pin Assignments (Multiplexador de sinais do pino). Para realizar essa tarefa deve-se utilizar a macro PORT_PCR_MUX(x) para configurar o multiplexador de sinais do pino, onde x é alternativa de funcionalidade do pino. A seguir são apresentas imagens com a tabela com KL25 Signal Multiplexing and Pin Assignments.


Configuração dos Parâmetros
O primeiro parâmetro que deve ser configurado é a frequência do Clock (Baud Rate). Para realizar essa operação deve-se utilizar o registrador I2C Frequency Divider register (I2Cx_F). Os dois Bits mais significativos do registrador é MULT. Os Bits MULT definem o fator de multiplicação, que é utilizado para definir a taxa de transmissão da comunicação I²C.
Para configurar os Bits MULT deve-se utilizar a macro I2C_F_MULT(x), onde x é valor do fator.
Os demais Bits são os INC, são os Bits que compõem o valor do Prescales. Em conjunto com o MULT definem o valor da taxa de transmissão. A macro I2C_F_ICR(x) é utilizada para configurar o INC, x é valor do Prescale. As figuras abaixo ilustram os detalhes do registrador.



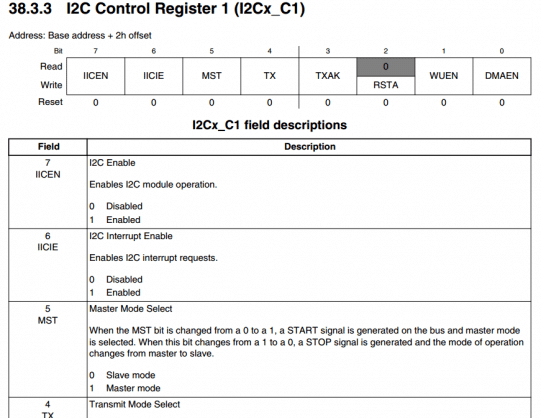
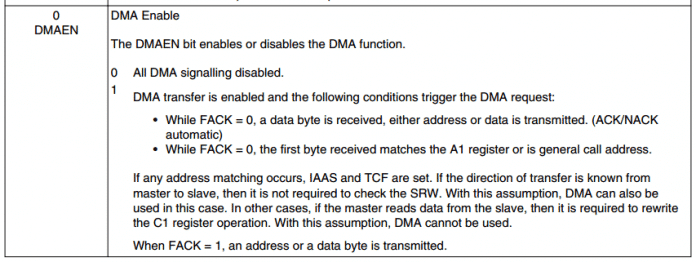
O último item que devemos configurar é o registrador I2C Control Register 1 (I2Cx_C1). É neste registrador onde se encontra os principais itens para controlar a comunicação I²C. A seguir é apresentada tabela com cada Bit do registrador, sua macro correspondente e descrição do mesmo.
|
Bit |
Macro |
Descrição |
|
IICEN |
I2C_C1_IICEN_MASK |
Habilita I²C |
|
IICIE |
I2C_C1_IICIE_MASK |
Habilita Interrupção |
|
MST |
I2C_C1_MST_MASK |
Seleção do Modo Mestre |
|
TX |
I2C_C1_TX_MASK |
Seleção do Modo de Transmissão |
|
TXAK |
I2C_C1_TXAK_MASK |
Transmite o Acknowledge Enable |
|
RSTA |
I2C_C1_RSTA_MASK |
Repetir START |
|
WUEN |
I2C_C1_WUEN_MASK |
Habilita Wakeup |
|
DMAEN |
I2C_C1_DMAEN_MASK |
Habilita DMA |
A seguir são apresentadas imagens que ilustram com detalhe cada Bit do registrador I2C Control Register 1 (I2Cx_C1).

Leitura e Escrita da Comunicação I²C
Para realizar leitura e escrita no barramento de comunicação I²C será necessário apresentar mais dois registradores.
O primeiro registrador é I2C Status register (I2Cx_S), possui Bits de leitura e escrita, utilizada para gerenciar a comunicação I²C. A seguir temos algumas imagens para demonstrar os Bits do registrador.



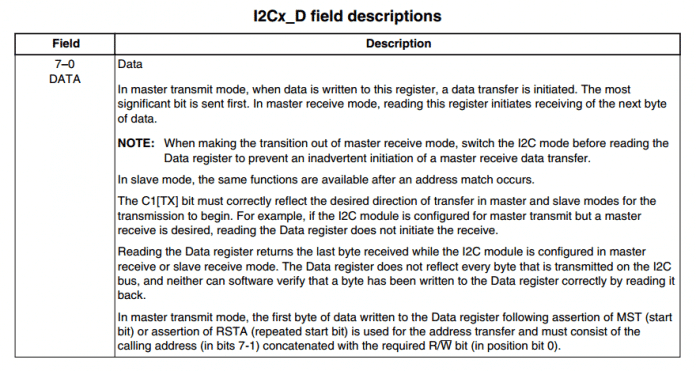
O segundo registrador a ser apresentado é o I2C Data I/O register (I2Cx_D). É através desse registrador que são feitas as leituras e escritas no barramento de comunicação I²C. As figuras a seguir ilustram com detalhes o registrador.

A seguir é apresentada a biblioteca desenvolvida para o barramento de comunicação I²C para utilizar com a Freedom Board KL25Z.
O código fonte abaixo é do arquivo i2c.h.
/* * i2c.h * * Created on: 14/04/2017 * Author: evandro */ #ifndef SOURCES_I2C_H_ #define SOURCES_I2C_H_ #include "MKL25Z4.h" #include "stdbool.h" #define ALT0 0 #define ALT1 1 #define ALT2 2 #define ALT3 3 #define MULT0 0 #define MULT1 1 #define MULT2 2 #define I2C_WRITE 0 // Master write #define I2C_READ 1 // Master read bool i2c_Init(I2C_MemMapPtr i2c, uint8_t alt, uint8_t mult, uint8_t icr); void i2c_DisableAck(I2C_MemMapPtr i2c); void i2c_EnableAck(I2C_MemMapPtr i2c); void i2c_RepeatedStart(I2C_MemMapPtr i2c); void i2c_EnterRxMode(I2C_MemMapPtr i2c); void i2c_Start(I2C_MemMapPtr i2c); void i2c_Stop(I2C_MemMapPtr i2c); void i2c_Wait(I2C_MemMapPtr i2c); void i2c_WriteByte(I2C_MemMapPtr i2c,uint8_t data); void i2c_WriteRegister(I2C_MemMapPtr i2c,uint8_t SlaveAddress, uint8_t RegisterAddress, uint8_t data); uint8_t i2c_ReadByte(I2C_MemMapPtr i2c); uint8_t i2c_ReadRegister(I2C_MemMapPtr i2c,uint8_t SlaveAddress,uint8_t RegisterAddress); uint8_t i2c_ReadMultRegister(I2C_MemMapPtr i2c,uint8_t SlaveAddress, uint8_t RegisterAddress,uint8_t n_data, uint8_t *res); void i2c_WriteMultRegister(I2C_MemMapPtr i2c,uint8_t SlaveAddress, uint8_t RegisterAddress, uint8_t n_data, uint8_t *data); void delay(uint32_t t); #endif /* SOURCES_I2C_H_ */
A seguir temos o código fonte do arquivo i2c.c.
/*
* i2c.c
*
* Created on: 14/04/2017
* Author: evandro
*/
#include "i2c.h"
/****************************************************************************************
*
*****************************************************************************************/
bool i2c_Init(I2C_MemMapPtr i2c, uint8_t alt, uint8_t mult, uint8_t icr)
{
if(i2c == I2C0)
{
switch(alt)
{
case ALT0:
SIM_SCGC5 |= SIM_SCGC5_PORTE_MASK; //Turn on clock to E module
PORTE_PCR24 = PORT_PCR_MUX(0x5); //Set PTE24 to mux 5 [I2C_SCL]
PORTE_PCR25 = PORT_PCR_MUX(0x5); //Set PTE25 to mux 5 [I2C_SDA]
break;
case ALT1:
SIM_SCGC5 |= SIM_SCGC5_PORTB_MASK; //Turn on clock to E module
PORTB_PCR0 = PORT_PCR_MUX(0x2); //Set PTB0 to mux 2 [I2C_SCL]
PORTB_PCR1 = PORT_PCR_MUX(0x2); //Set PTB1 to mux 2 [I2C_SDA]
break;
case ALT2:
SIM_SCGC5 |= SIM_SCGC5_PORTB_MASK; //Turn on clock to E module
PORTB_PCR2 = PORT_PCR_MUX(0x2); //Set PTB2 to mux 2 [I2C_SCL]
PORTB_PCR3 = PORT_PCR_MUX(0x2); //Set PTB3 to mux 2 [I2C_SDA]
break;
case ALT3:
SIM_SCGC5 |= SIM_SCGC5_PORTC_MASK; //Turn on clock to E module
PORTC_PCR8 = PORT_PCR_MUX(0x2); //Set PTB2 to mux 2 [I2C_SCL]
PORTC_PCR9 = PORT_PCR_MUX(0x2); //Set PTB3 to mux 2 [I2C_SDA]
break;
default:
return false;
break;
}
SIM_SCGC4 |= SIM_SCGC4_I2C0_MASK;
}
else if (i2c == I2C1)
{
switch(alt)
{
case ALT0:
SIM_SCGC5 |= SIM_SCGC5_PORTE_MASK; //Turn on clock to E module
PORTE_PCR0 = PORT_PCR_MUX(0x6); //Set PTE0 to mux 6 [I2C_SDA]
PORTE_PCR1 = PORT_PCR_MUX(0x6); //Set PTE1 to mux 6 [I2C_SCL]
break;
case ALT1:
SIM_SCGC5 |= SIM_SCGC5_PORTA_MASK; //Turn on clock to A module
PORTA_PCR3 = PORT_PCR_MUX(0x2); //Set PTA3 to mux 2 [I2C_SCL]
PORTA_PCR4 = PORT_PCR_MUX(0x2); //Set PTA4 to mux 2 [I2C_SDA]
break;
case ALT2:
SIM_SCGC5 |= SIM_SCGC5_PORTC_MASK; //Turn on clock to C module
PORTC_PCR1 = PORT_PCR_MUX(0x2); //Set PTC1 to mux 2 [I2C_SCL]
PORTC_PCR2 = PORT_PCR_MUX(0x2); //Set PTC2 to mux 2 [I2C_SDA]
break;
case ALT3:
SIM_SCGC5 |= SIM_SCGC5_PORTC_MASK; //Turn on clock to E module
PORTC_PCR10 = PORT_PCR_MUX(0x2); //Set PTC10 to mux 2 [I2C_SCL]
PORTC_PCR11 = PORT_PCR_MUX(0x2); //Set PTC11 to mux 2 [I2C_SDA]
break;
default:
return false;
break;
}
SIM_SCGC4 |= SIM_SCGC4_I2C1_MASK;
}
else
{
return false;
}
i2c->F = I2C_F_ICR(icr) | I2C_F_MULT(mult);
i2c->C1 = I2C_C1_IICEN_MASK; // I2C Enable
return true;
}
/****************************************************************************************
*
*****************************************************************************************/
void i2c_DisableAck(I2C_MemMapPtr i2c)
{
i2c->C1 |= I2C_C1_TXAK_MASK;
}
/****************************************************************************************
*
*****************************************************************************************/
void i2c_EnableAck(I2C_MemMapPtr i2c)
{
i2c->C1 &= ~I2C_C1_TXAK_MASK;
}
/****************************************************************************************
*
*****************************************************************************************/
void i2c_RepeatedStart(I2C_MemMapPtr i2c)
{
i2c->C1 |= I2C_C1_RSTA_MASK;
}
/****************************************************************************************
*
*****************************************************************************************/
void i2c_EnterRxMode(I2C_MemMapPtr i2c)
{
i2c->C1 &= ~I2C_C1_TX_MASK;
}
/****************************************************************************************
*
*****************************************************************************************/
void i2c_Start(I2C_MemMapPtr i2c)
{
i2c->C1 |= I2C_C1_TX_MASK;
i2c->C1 |= I2C_C1_MST_MASK;
}
/****************************************************************************************
*
*****************************************************************************************/
void i2c_Stop(I2C_MemMapPtr i2c)
{
i2c->C1 &= ~I2C_C1_MST_MASK;
i2c->C1 &= ~I2C_C1_TX_MASK;
}
/****************************************************************************************
*
*****************************************************************************************/
void i2c_Wait(I2C_MemMapPtr i2c)
{
uint32_t i = 0;
i = 1000000;
while(((i2c->S & I2C_S_IICIF_MASK) == 0) && i)
{
i--;
}
i2c->S |= I2C_S_IICIF_MASK;
}
/****************************************************************************************
*
*****************************************************************************************/
void i2c_WriteByte(I2C_MemMapPtr i2c,uint8_t data)
{
i2c->D = (uint8_t)data;
}
/****************************************************************************************
*
*****************************************************************************************/
uint8_t i2c_ReadByte(I2C_MemMapPtr i2c)
{
return (uint8_t)( i2c->D );
}
/****************************************************************************************
*
*****************************************************************************************/
void i2c_WriteRegister(I2C_MemMapPtr i2c,uint8_t SlaveAddress,
uint8_t RegisterAddress, uint8_t data)
{
i2c_Start(i2c);
i2c_WriteByte(i2c, ((SlaveAddress << 1) | I2C_WRITE));
i2c_Wait(i2c);
i2c_WriteByte(i2c,RegisterAddress);
i2c_Wait(i2c);
i2c_WriteByte(i2c,data);
i2c_Wait(i2c);
i2c_Stop(i2c);
delay(50);
}
/****************************************************************************************
*
*****************************************************************************************/
uint8_t i2c_ReadRegister(I2C_MemMapPtr i2c,uint8_t SlaveAddress,uint8_t RegisterAddress)
{
uint8_t res = 0;
i2c_Start(i2c);
i2c_WriteByte(i2c, ((SlaveAddress << 1) | I2C_WRITE));
i2c_Wait(i2c);
i2c_WriteByte(i2c,RegisterAddress);
i2c_Wait(i2c);
i2c_RepeatedStart(i2c);
i2c_WriteByte(i2c, ((SlaveAddress << 1) | I2C_READ));
i2c_Wait(i2c);
i2c_EnterRxMode(i2c);
i2c_DisableAck(i2c);
res = i2c_ReadByte(i2c);
i2c_Wait(i2c);
i2c_Stop(i2c);
res = i2c_ReadByte(i2c);
delay(50);
return res;
}
/****************************************************************************************
*
*****************************************************************************************/
uint8_t i2c_ReadMultRegister(I2C_MemMapPtr i2c,uint8_t SlaveAddress,
uint8_t RegisterAddress,uint8_t n_data, uint8_t *res)
{
uint8_t i = 0;
i2c_Start(i2c);
i2c_WriteByte(i2c, ((SlaveAddress << 1) | I2C_WRITE));
i2c_Wait(i2c);
i2c_WriteByte(i2c,RegisterAddress);
i2c_Wait(i2c);
i2c_RepeatedStart(i2c);
i2c_WriteByte(i2c, ((SlaveAddress << 1) | I2C_READ));
i2c_Wait(i2c);
i2c_EnterRxMode(i2c);
i2c_EnableAck(i2c);
i = i2c_ReadByte(i2c);
i2c_Wait(i2c);
for(i=0;i<(n_data-2);i++)
{
*res = i2c_ReadByte(i2c);
res++;
i2c_Wait(i2c);
}
i2c_DisableAck(i2c);
*res = i2c_ReadByte(i2c);
res++;
i2c_Wait(i2c);
i2c_Stop(i2c);
*res = i2c_ReadByte(i2c);
delay(50);
}
/****************************************************************************************
*
*****************************************************************************************/
void i2c_WriteMultRegister(I2C_MemMapPtr i2c,uint8_t SlaveAddress,
uint8_t RegisterAddress, uint8_t n_data, uint8_t *data)
{
uint8_t i = 0;
i2c_Start(i2c);
i2c_WriteByte(i2c, ((SlaveAddress << 1) | I2C_WRITE));
i2c_Wait(i2c);
i2c_WriteByte(i2c,RegisterAddress);
i2c_Wait(i2c);
for(i=0;i<n_data;i++)
{
i2c_WriteByte(i2c,*data);
i2c_Wait(i2c);
data++;
}
i2c_Stop(i2c);
delay(50);
}
/****************************************************************************************
*
*****************************************************************************************/
void delay(uint32_t t)
{
uint32_t cnt = 0;
for(cnt=0; cnt<t; cnt++)
{
__asm("nop");
};
}
/*****************************************************************************************/
Aplicação com o Módulo Tiny RTC I2C
O módulo Tiny RTC I2C é composto pelo RTC (Real-Time Clock) DS1307 com bateria e memória EEPROM AT24C32. Para mais detalhes sobre o módulo Tiny RTC I2C recomendo que veja a série de artigos produzida pelo Francesco Sacco “Módulo Tiny RTC I2C”.
Na figura a seguir temos o circuito elétrico que foi montado para aplicação.

Abaixo temos o código fonte ds1307.h.
/*
* ds1307.h
*
* Created on: 14/04/2017
* Author: evandro
*/
#ifndef SOURCES_DS1307_H_
#define SOURCES_DS1307_H_
#include "MKL25Z4.h"
#include "i2c.h"
#include "stdbool.h"
#define END_DS1307 0b01101000//0x68
typedef struct {
uint8_t seconds;
uint8_t minutes;
uint8_t hours;
uint8_t day;
uint8_t date;
uint8_t month;
uint8_t year;
}data_ds1307;
void Init_DS1307(void);
bool Read_DS1307(data_ds1307 *dt);
bool Write_DS1307(data_ds1307 dt);
//uint8_t Read_DS1307_Byte(uint8_t end);
#endif /* SOURCES_DS1307_H_ */
Abaixo é apresentado o código fonte ds1307.c.
/*
* ds1307.c
*
* Created on: 14/04/2017
* Author: evandro
*/
#include "ds1307.h"
void Init_DS1307(void)
{
i2c_Init(I2C1,ALT0,MULT0,0x14);
}
/****************************************************************************************
*
*****************************************************************************************/
bool Read_DS1307(data_ds1307 *dt)
{
uint8_t data[8];
uint8_t i = 0;
uint8_t dado0;
uint8_t dado1;
uint8_t dado2;
i2c_ReadMultRegister(I2C1,END_DS1307,0x00,7,&data);
dado0 = (uint8_t)(data[0] & 0b00001111);
dado1 = (uint8_t)(data[0] & 0b01110000);
dado1 = (uint8_t)(dado1 >> 4);
dt->seconds = (uint8_t)((dado1*10)+dado0);
dado0 = (uint8_t)(data[1] & 0b00001111);
dado1 = (uint8_t)(data[1] & 0b01110000);
dado1 = (uint8_t)(dado1 >> 4);
dt->minutes = (uint8_t)((dado1*10)+dado0);
if((data[2] & 0b01000000) == 0)
{
// Modo 24 Horas
dado0 = (uint8_t)(data[2] & 0b00001111);
dado1 = (uint8_t)(data[2] & 0b00010000);
dado1 = (uint8_t)(dado1 >> 4);
dado2 = (uint8_t)(data[2] & 0b00100000);
dado2 = (uint8_t)(dado2 >> 5);
dt->hours = (uint8_t)( (dado2*20) + (dado1*10) + dado0 );
}
else
{
// Modo 12 Horas
dado0 = (uint8_t)(data[2] & 0b00001111);
dado1 = (uint8_t)(data[2] & 0b00010000);
dado1 = (uint8_t)(dado1 >> 4);
dado2 = (uint8_t)(data[2] & 0b00100000);
dado2 = (uint8_t)(dado2 >> 5);
dt->hours = (uint8_t)((dado1*10) + dado0);
}
dt->day = (uint8_t)(data[3]);
dado0 = (uint8_t)(data[4] & 0b00001111);
dado1 = (uint8_t)(data[4] & 0b00110000);
dado1 = (uint8_t)(dado1 >> 4);
dt->date = (uint8_t)((dado1*10)+dado0);
dado0 = (uint8_t)(data[5] & 0b00001111);
dado1 = (uint8_t)(data[5] & 0b00010000);
dado1 = (uint8_t)(dado1 >> 4);
dt->month = (uint8_t)((dado1*10)+dado0);
dado0 = (uint8_t)(data[6] & 0b00001111);
dado1 = (uint8_t)(data[6] & 0b11110000);
dado1 = (uint8_t)(dado1 >> 4);
dt->year = (uint8_t)((dado1*10)+dado0);
}
/****************************************************************************************
*
*****************************************************************************************/
bool Write_DS1307(data_ds1307 dt)
{
uint8_t data[8];
uint8_t aux = 0;
// minutos
if(dt.minutes < 60)
{
//dado0 = (uint8_t)((dt.minutes / 10) << 4);
//dado0 += (uint8_t)(dt.minutes % 10);
data[0] = (uint8_t)((dt.minutes / 10) << 4);
data[0] += (uint8_t)(dt.minutes % 10);
}
else
{
return false;
}
// horas
if(dt.hours <= 9)
{
//dado1 = dt.hours;
data[1] = dt.hours;
//teste = 0b00000001;
}
else if((dt.hours > 9)&&(dt.hours < 19))
{
aux = (uint8_t)(dt.hours % 10);
data[1] = (uint8_t)(0b00010000 + aux);
//teste |= 0b00000010;
}
else if((dt.hours > 19)&&(dt.hours < 23))
{
aux = (uint8_t)(dt.hours % 10);
data[1] = (uint8_t)(0b00100000 + aux);
//teste |= 0b00000010;
}
else
{
return false;
}
// dia da semana
if((dt.day >= 1)&&(dt.day <= 7))
{
//dado2 = (uint8_t)(dt.day);
data[2] = (uint8_t)(dt.day);
}
else
{
return false;
}
// mes
if((dt.month >= 1)&&(dt.month <= 12))
{
//dado4 = (uint8_t)((dt.mount / 10) << 4);
//dado4 += (uint8_t)(dt.mount % 10);
data[4] = (uint8_t)((dt.month / 10) << 4);
data[4] += (uint8_t)(dt.month % 10);
}
else
{
return false;
}
//dia do mes
if((dt.date>=1)&&(dt.date<=31))
{
//dado3 = (uint8_t)((dt.date / 10) << 4);
//dado3 += (uint8_t)(dt.date % 10);
data[3] = (uint8_t)((dt.date / 10) << 4);
data[3] += (uint8_t)(dt.date % 10);
}
else
{
return false;
}
// ano
if(dt.year < 100)
{
//dado5 = (uint8_t)((dt.year / 10) << 4);
//dado5 += (uint8_t)(dt.year % 10);
data[5] = (uint8_t)((dt.year / 10) << 4);
data[5] += (uint8_t)(dt.year % 10);
}
else
{
return false;
}
i2c_WriteMultRegister(I2C1,END_DS1307,0x01,6,&data);
return true;
}
/****************************************************************************************
*
*****************************************************************************************/
A seguir é demonstrado o código fonte main.c da aplicação.
/*
*
*/
#include "MKL25Z4.h"
#include "i2c.h"
#include "gpio.h"
#include "ds1307.h"
data_ds1307 rtc, rtc_in;
uint32_t i = 0;
int main(void)
{
// Inicializa barramento I2C - DS1307
Init_DS1307();
// prepara o dados para ser salvos no RTC DS1307
// 02:17 - 7 (sabado) - 15/04/17
rtc_in.minutes = 17; // minutos
rtc_in.hours = 2; // horas
rtc_in.day = 7; // dia da semana
rtc_in.date = 15; // dia do mes
rtc_in.month = 4; // mes
rtc_in.year = 17; // ano
Write_DS1307(rtc_in); // Configura o RTC DS1307
while(1)
{
for(i=0;i<500000;i++); // delay
Read_DS1307(&rtc); // Le dados do RTC DS1307
rtc.date;
rtc.day;
rtc.hours;
rtc.minutes;
rtc.month;
rtc.seconds;
rtc.year;
//i = 0;
}
}
Conclusão
Neste artigo foi apresentada mais uma biblioteca de software para a Freedom Board KL25Z e também a biblioteca a realizar leitura e escrita no RTC DS1307.
Nos próximos artigos vamos apresentar outras bibliotecas de software (Timer, UART e entre outras) para utilizar com FRDM-KL25. A biblioteca apresentada aqui está disponível no meu GitHub.
Referências















