A demanda por soluções de acionamento de motores de alta potência tem crescido nos últimos anos. Em particular, aplicações de servodrive em baixa tensão vêm exigindo sistemas confiáveis, capazes de gerenciar uma transferência significativa de potência para o motor elétrico, variando de algumas centenas até milhares de watts. Esse campo de aplicação é amplamente dominado por motores sem escova trifásicos, graças à sua flexibilidade e alto desempenho no posicionamento e na regulação do torque aplicado à carga mecânica.[1]
Como essas aplicações normalmente utilizam tensões industriais padrão, como 24 V e 48 V, seus estágios de potência precisam gerenciar correntes de várias dezenas de amperes, o que resulta em um projeto crítico sob diferentes perspectivas. Além disso, essa complexidade de projeto é intensificada pelas tendências mais recentes do mercado, que impulsionam o desenvolvimento de drivers de motor muito compactos, montados diretamente sobre o próprio motor controlado, trazendo vantagens como a redução de cabeamento, de emissões radiadas e de custos. Nesse contexto, o dimensionamento dos transistores finais que compõem o estágio de potência e sua conexão ao servomotor são fatores cruciais, pois os níveis elevados de corrente podem aumentar as perdas de potência e as temperaturas, além de sobrecarregar as trilhas da placa, o que deve ser devidamente tratado.[2]
Para extrair o máximo desempenho de motores sem escovas trifásicos, são necessárias técnicas de controle avançadas, como o Controle Vetorial de Campo (FOC – Field Oriented Control), no qual o campo magnético produzido pelas correntes que fluem nos rolamentos do motor é atualizado dinamicamente para maximizar a eficiência da máquina elétrica.
Um exemplo disso é o STSPIN32G4 da STMicroelectronics, que combina um microcontrolador STM32 de alto desempenho com um gate driver de meia ponte tripla e um circuito de gerenciamento de energia flexível. Enquanto o microcontrolador gerencia a maior parte dos algoritmos avançados de controle de motor, o driver controla totalmente o estágio de potência. O novo design de referência EVLSERVO1 (Figura 1) utiliza o STSPIN32G4 para aplicações em acionadores servo.

Descrição do Projeto
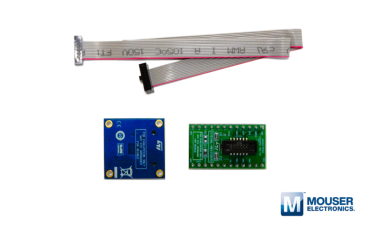
O EVLSERVO1 é baseado em um design modular, como mostrado na Figura 1, composto por duas placas de circuito impresso (PCBs) empilhadas: a placa de controle e a placa de potência. O projeto é voltado para motores CC sem escovas trifásicos, com potência contínua de até 2 kW com resfriamento passivo ou 3 kW utilizando ventilação forçada. O sistema foi projetado para operar em ambientes industriais com tensão nominal de barramento de até 48 V. No entanto, ele foi desenvolvido com uma ampla margem, estendendo sua faixa operacional para 75 V. A corrente máxima de saída para o motor é de 63 Arms ou 42 Arms, respectivamente, com ou sem ventilador.
Placa de Potência
A Figura 2 mostra a placa de potência, composta principalmente por 12 MOSFETs STL160N10F8 organizados em uma configuração de meia-ponte tripla. Cada chave das seções de low-side e high-side é formada por dois transistores em paralelo. O sistema oferece proteção contra sobretensão no barramento durante a frenagem regenerativa. Esta é uma característica fundamental, pois quando o servo drive precisa reduzir a velocidade de operação, o algoritmo de controle ajusta a modulação aplicada ao motor para reverter a transferência de energia.

Placa de controle
O STSPIN32G4 é o núcleo da placa de controle, como ilustrado na Figura 2. O dispositivo executa o algoritmo de controle no microcontrolador STM32G431 de alto desempenho embutido, com núcleo Cortex®-M4 e frequência de clock de até 170 MHz.
O sistema fornece medição bidirecional das correntes do motor, conforme exigido pelo controle FOC. A medição é realizada pela queda de tensão nos três resistores shunt, um para cada fase do motor, amplificada por um estágio de ganho baseado em amplificadores operacionais. Os sinais amplificados são então amostrados e convertidos por dois ADCs de 12 bits internos ao STSPIN32G4.[3]
Desempenho
Para verificar a robustez e o desempenho do EVLSERVO1, foi utilizado o conjunto mostrado na Figura 3.

A entrada principal do sistema foi conectada a uma fonte de alimentação CC capaz de fornecer até 3,5 kW. Em contraste, as três saídas foram conectadas a um motor BLDC trifásico capaz de entregar uma potência mecânica de 4,47 kW (6 HP) ao girar a 3000 rpm. A potência mecânica do motor foi dissipada por meio de um freio de histerese, enquanto o motor estava acoplado a uma junção flexível. Três resistores de potência foram conectados em paralelo como resistores de frenagem, com uma resistência total de aproximadamente 0,9 Ω, considerando a fiação para a placa.
O STSPIN32G4 foi configurado com firmware que implementa o algoritmo de controle FOC. O EVLSERVO1 foi levado aos seus limites operacionais máximos, gerenciando uma potência média próxima de 3 kW, como mostrado no display da fonte de alimentação na Figura 3.
O sistema atingiu uma condição de estado estacionário após aproximadamente 15 minutos de operação em um ambiente a cerca de 25°C. O ponto mais quente da placa foi um MOSFET do lado baixo, que alcançou 113°C, visível no lado esquerdo da Figura 4. Após este teste, o ventilador foi ligado e a corrente de saída aumentou para 63Arms. Nessa condição, a temperatura máxima do MOSFET mais quente caiu para 105°C, conforme mostrado no lado direito da Figura 4.

A Figura 5 mostra um exemplo de intervenção no resistor de frenagem. Nesse caso, o freio mecânico foi desativado para evitar a dissipação de potência significativa, exceto pelas perdas por fricção. Em contraste, a inércia mecânica do sistema foi aproveitada para armazenar energia durante a rotação, com o motor girando no sentido horário. Em seguida, o driver foi comandado para inverter repentinamente a rotação do eixo no sentido antihorário, a fim de estimular a frenagem regenerativa. Como é possível observar na figura, houve uma fase inicial em que a tensão do barramento aumentou, pois o motor passou a funcionar como gerador e uma determinada corrente foi injetada nos capacitores de barramento do sistema.
Durante toda a fase de frenagem, os resistores foram ativados várias vezes em modo pulsado, mantendo a tensão do barramento dentro de uma faixa segura entre 62V e 65V. Nesse teste de frenagem, a corrente pulsada atingiu 60 A, resultando em uma potência de pico de aproximadamente 3,4 kW e uma potência média de 148 W. Durante essa fase, o EVLSERVO1 forneceu uma potência média de cerca de 4,7 W para carregar os capacitores de barramento do equipamento. Em seguida, o motor inverteu sua direção e começou a acelerar no sentido antihorário, com potência da fonte que aumentou progressivamente até 400 W para atingir a velocidade alvo.

Conclusão
Aplicações de servo modular de baixa tensão exigem sistemas de controle de motor confiáveis e eficientes. O EVLSERVO1, com seu formato compacto, permite que o sistema de acionamento seja posicionado próximo ao motor, o que é desejável em aplicações servo-modulares. Diversas proteções estão disponíveis, incluindo circuitos dedicados para gerenciar possíveis sobretensões no barramento causadas pela frenagem regenerativa, garantindo um projeto robusto mesmo em condições de falha.
Fontes
[1] https://ieeexplore.ieee.org/document/6713062 [2] https://www.st.com/resource/en/technical_article/ta0361-thermally-aware-highpower-inverter-board-for-batterypowered-applications–stmicroelectronics.pdf [3] https://www.st.com/resource/en/application_note/an5397-current-sensing-in-motion-control-applications-stmicroelectronics.pdfArtigo escrito por Enrico Poli e Prospero Lombardi e publicado no blog da Mouser Electronics: The Modular Servo Driver
Traduzido pela Equipe Embarcados. Visite a página da Mouser Electronics no Embarcados